- 您现在的位置:买卖IC网 > PDF目录67359 > AM512BVD (RENISHAW PLC) MAGNETIC FIELD SENSOR-HALL EFFECT, 1-4 V, SQUARE, SURFACE MOUNT PDF资料下载
参数资料
| 型号: | AM512BVD |
| 厂商: | RENISHAW PLC |
| 元件分类: | 磁阻传感器 |
| 英文描述: | MAGNETIC FIELD SENSOR-HALL EFFECT, 1-4 V, SQUARE, SURFACE MOUNT |
| 封装: | ROHS COMPLIANT, LQFP-44 |
| 文件页数: | 3/22页 |
| 文件大小: | 608K |
| 代理商: | AM512BVD |
Data sheet
AM512BD01_04
Issue 4, 14
th January 2009
2009 RLS d.o.o.
A
associate company
11
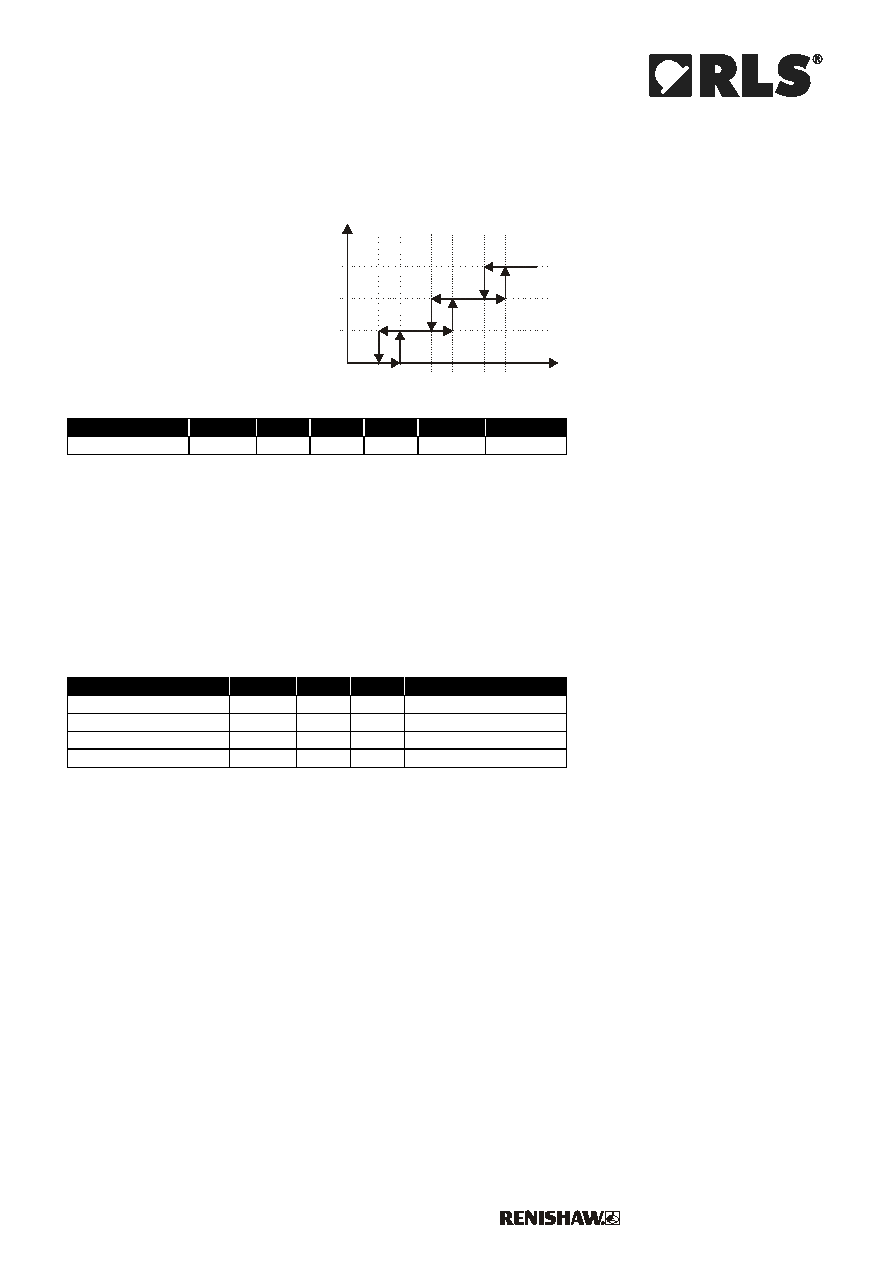
Hysteresis
The AM512B uses an electrical hysteresis when converting analogue signals to digital. The hysteresis
prevents the flickering of the digital output at a stationary magnet position. The effect is a position hysteresis
when rotating the magnet CW or CCW.
Magnet
position
Output
012
3
0
2
3
1
Fig. 15: Hysteresis
Parameter
Symbol
Min.
Typ.
Max.
Unit
Note
Hysteresis
Hyst.
0.3
0.45
0.6
deg
*
* The hysteresis depends on the signal amplitude. A higher amplitude means a lower hysteresis.
Position delay
At high rotational speed a position delay between the magnet position and the electrical output appears
because of filtering. Filtering is carried out with an RC filter. The value of the resistor is 10 k and the
recommended value of the capacitor is 10 nF. Position delay can be calculated as follows:
{}
0
/
tan
f
Arc
=
Δ
(f = frequency, f
0 = (2πRC)
-1)
At high rotational speed the amplitude decreases.
Parameter
Symbol
Typ.
Unit
Note
Position delay
Δφpos
0.36
deg
@ 10 Hz, C = 10 nF
Position delay
Δφpos
3.6
deg
@ 100 Hz, C = 10 nF
Amplitude decreasing
ΔA
0.2
%
@ 100 Hz, C = 10 nF
Amplitude decreasing
ΔA
4.6
%
@ 500 Hz, C = 10 nF
Nonlinearity
Nonlinearity is defined as the difference between the actual angular position of the magnet and the angular
position output from the AM512B. Readings are compared at each output position change.
Integral nonlinearity is the total position error of the AM512B output. Figure 16 (page 12) shows a typical
error plot if the recommended magnet is carefully positioned. Figure 17 (page 12) shows the error plot if the
magnet is on the limit of alignment tolerances. Integral nonlinearity includes magnet misalignment error,
differential nonlinearity and transition noise.
Differential nonlinearity is the difference between the measured position step and the ideal position step.
Figure 18 (page 12) shows a typical differential nonlinearity plot. This is a function of the interpolator
accuracy. Differential nonlinearity is repeatable to the transition noise if it is re-measured.
The difference between two differential measurements represents the transition noise. Transition noise is a
consequence of electrical noise in the analogue signals (see Figure 19 on page 12).
相关PDF资料 |
PDF描述 |
|---|---|
| AM512BVC | MAGNETIC FIELD SENSOR-HALL EFFECT, 1-4 V, SQUARE, SURFACE MOUNT |
| AMF-5F-18002200-35-10P | 18000 MHz - 22000 MHz RF/MICROWAVE WIDE BAND LOW POWER AMPLIFIER |
| AMF-4F-17101840-35-10P | 17100 MHz - 18400 MHz RF/MICROWAVE WIDE BAND LOW POWER AMPLIFIER |
| AMF-4F-04400510-05-13P | 4400 MHz - 5100 MHz RF/MICROWAVE NARROW BAND LOW POWER AMPLIFIER |
| AMF-3F-14001450-30-8P | 14000 MHz - 14500 MHz RF/MICROWAVE NARROW BAND LOW POWER AMPLIFIER |
相关代理商/技术参数 |
参数描述 |
|---|---|
| AM515-66NI | 制造商:WALL 制造商全称:Wall Industries,Inc. 功能描述:Highly suitable for high speed pick and place machine operation |
| AM515-67N | 制造商:WALL 制造商全称:Wall Industries,Inc. 功能描述:This economically priced converter is perfect for low power applications |
| AM51610A53NA | 制造商:Panasonic Electric Works 功能描述:Switch,pin plunger,1.96N,QC/sldr,16A |
| AM51610A53N-A | 功能描述:基本/快动开关 AM5 QV Switch Plunger, QC RoHS:否 制造商:Omron Electronics 触点形式:SPDT 执行器:Lever 电流额定值:5 A 电压额定值 AC:250 V 电压额定值 DC:30 V 功率额定值: 工作力:120 g IP 等级:IP 67 NEMA 额定值: 端接类型:Wire 安装:Panel |
| AM51610A53NAT | 制造商:Panasonic Electric Works 功能描述: |
发布紧急采购,3分钟左右您将得到回复。