- 您现在的位置:买卖IC网 > PDF目录16792 > APEK4979GLP-01-T-DK (Allegro Microsystems Inc)BOARD EVAL MOTOR CONTROL A4979 PDF资料下载
参数资料
| 型号: | APEK4979GLP-01-T-DK |
| 厂商: | Allegro Microsystems Inc |
| 文件页数: | 37/44页 |
| 文件大小: | 0K |
| 描述: | BOARD EVAL MOTOR CONTROL A4979 |
| 标准包装: | 1 |
| 主要目的: | 电源管理,电机控制,步进控制器 |
| 嵌入式: | 否 |
| 已用 IC / 零件: | A4979 |
| 已供物品: | 板 |
| 其它名称: | 620-1468 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页当前第37页第38页第39页第40页第41页第42页第43页第44页
�� �
�
�A4979�
�Microstepping� Programmable� Stepper� Motor� Driver�
�With� Stall� Detect� and� Short� Circuit� Protection�
�Starting� at� the� top,� panel� (a)� in� figure� A1,� the� current� is� flowing�
�down� through� the� phase� A� winding� from� top� to� bottom� and� there�
�is� no� current� in� phase� B.� The� result� is� an� N� magnetic� pole� on� the�
�A� electromagnets� and� an� S� pole� on� the� A-bar� electromagnets.� The�
�rotor� position� is� such� that� that� the� poles� of� the� permanent� magnets�
�align� with� the� poles� of� the� electromagnets,� N� to� S.�
�In� the� next� panel,� panel� (b),� the� current� is� flowing� down� through�
�the� phase� B� winding� from� top� to� bottom� and� there� is� no� current�
�in� phase� A.� The� result� is� an� N� pole� on� the� B� electromagnets� and�
�an� S� pole� on� the� B-bar� electromagnets.� These� magnetic� poles� will�
�attract� and� repel� the� permanent� magnets� on� the� rotor� producing� a�
�force� that� moves� the� rotor� from� left� to� right� in� the� diagram� until�
�the� poles� of� the� permanent� magnets� again� align� with� the� poles� of�
�Microstepping�
�In� many� applications� it� is� necessary� to� improve� the� resolution� of�
�the� stepper� motor,� for� more� precise� positioning� control,� or� simply�
�to� increase� the� number� of� steps� per� revolution� to� reduce� the�
�torque� ripple� and� therefore� the� vibration� and� noise� of� the� motor.�
�Fortunately� this� can� be� achieved� by� driving� both� phases� at� the�
�same� time� in� order� to� move� the� rotor� to� a� position� between� two�
�electromagnets.� This� is� known� generically� as� microstepping.�
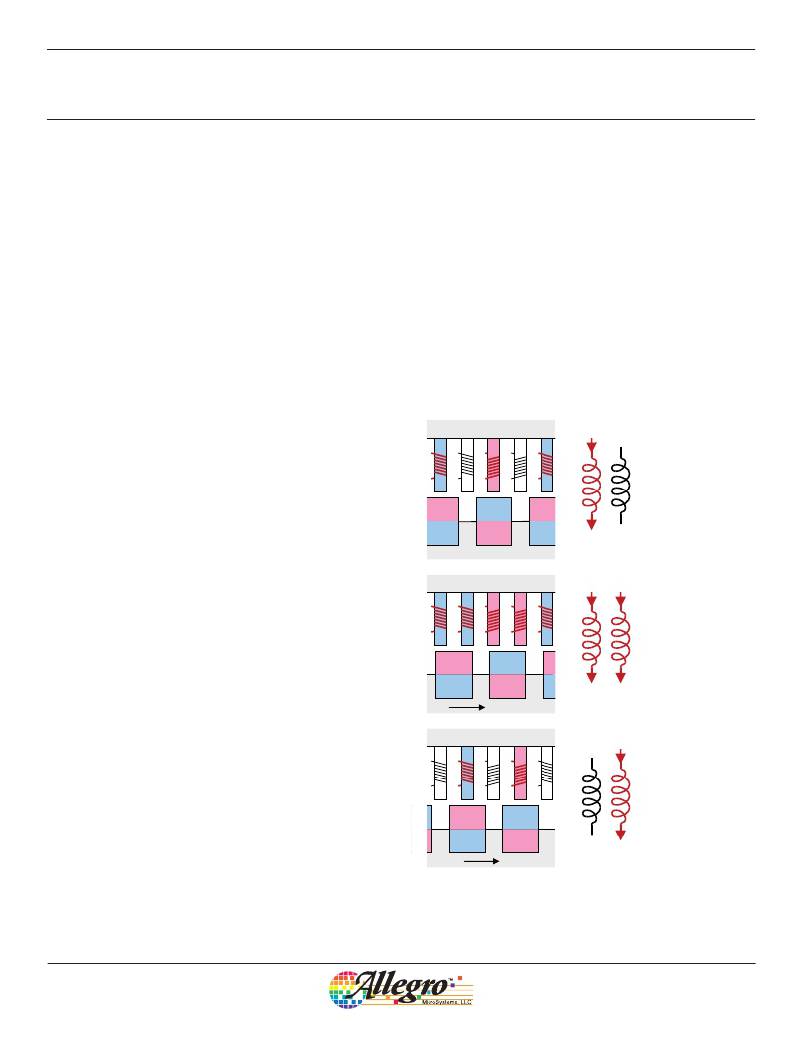
�Figure� A2� shows� the� basic� principle� of� microstepping.� Panels� (a)�
�and� (c)� of� figure� A2� correspond� to� panels� (a)� and� (b)� of� figure�
�A1.� Panel� (b)� shows� each� phase� energized� such� that� there� are� now�
�the� electromagnets.�
�In� panel� (c),� the� current� is� flowing� up� through� the� phase� A� wind-�
�ing� from� bottom� to� top� and� there� is� no� current� in� phase� B.� This�
�A�
�B�
�Stator�
�_�
�A�
�_�
�B�
�A�
�reverses� the� pole� orientation� from� the� top� panel,� such� that� there�
�is� an� S� pole� on� the� A� electromagnets� and� an� N� pole� on� the� A-bar�
�electromagnets.� As� before,� these� magnetic� poles� will� attract� and�
�N�
�S�
�S�
�N�
�N�
�S�
�A�
�B�
�(a)� Same� as�
�figure� A1(a)�
�repel� the� permanent� magnets� on� the� rotor� producing� a� force� that�
�moves� the� rotor� from� left� to� right� in� the� diagram,� until� poles� of�
�the� permanent� magnets� again� align� with� the� poles� of� the� electro-�
�N�
�S�
�Rotor�
�N�
�magnets.�
�The� bottom� panel,� panel� (d),� shows� the� final� combination� with�
�current� flowing� up� through� the� phase� B� winding� from� bottom� to�
�A�
�B�
�Stator�
�_�
�A�
�_�
�B�
�A�
�top� and� there� is� no� current� in� phase� A.� This� produces� an� N� pole�
�on� the� B� electromagnets� and� a� S� pole� on� the� B-bar� electromag-�
�N�
�N�
�S�
�S�
�N�
�A�
�B�
�(b)� Half-step�
�position�
�nets.� As� before,� these� magnetic� poles� will� attract� and� repel� the�
�S�
�N�
�S�
�permanent� magnets� on� the� rotor� producing� a� force� that� moves� the�
�rotor� from� left� to� right� until� poles� of� the� permanent� magnets� again�
�align� with� the� poles� of� the� electromagnets.�
�N�
�S�
�Rotor�
�N�
�Each� of� the� four� steps� in� figure� A1� represents� a� single� full�
�mechanical� step� of� the� stepper� motor.� The� four� steps� together�
�represent� a� single� electrical� cycle.�
�A�
�B�
�Stator�
�_�
�A�
�_�
�B�
�A�
�The� step� resolution� depends� entirely� on� the� mechanical� construc-�
�tion� of� the� motor� and� typically� there� will� be� 200� or� more� full�
�steps� per� mechanical� revolution� of� the� motor.� A� 200-step� motor�
�N�
�N�
�S�
�S�
�N�
�A�
�B�
�(c)� Same� as�
�figure� A1(b)�
�will� provide� a� resolution� of� 360� /� 200� =� 1.8°� of� rotation� per� step.�
�Stepping� in� the� opposite� direction� to� that� described� above� is� sim-�
�N�
�S�
�Rotor�
�ply� a� case� of� changing� the� step� sequence� or� inverting� one� of� the�
�phase� current� directions.�
�Figure� A2.� Half� step� operation�
�Allegro� MicroSystems,� LLC�
�115� Northeast� Cutoff�
�Worcester,� Massachusetts� 01615-0036� U.S.A.�
�1.508.853.5000;� www.allegromicro.com�
�A-3�
�相关PDF资料 |
PDF描述 |
|---|---|
| UCL1E151MCL6GS | CAP ALUM 150UF 25V 20% SMD |
| B78108S1273K | CHOKE RF 27UH 530MA AXIAL |
| RNF-100-1/8-CL-STK | HEAT SHRINK TUBING |
| H4PXH-1006G | DIP CABLE - HDP10H/AE10G/X |
| V300C8C100BG2 | CONVERTER MOD DC/DC 8V 100W |
相关代理商/技术参数 |
参数描述 |
|---|---|
| APEK4984SLP-01-T | 功能描述:BOARD EVAL MOTOR CONTROL A4984 RoHS:是 类别:编程器,开发系统 >> 评估演示板和套件 系列:- 标准包装:1 系列:PSoC® 主要目的:电源管理,热管理 嵌入式:- 已用 IC / 零件:- 主要属性:- 次要属性:- 已供物品:板,CD,电源 |
| APEK4984SLP-01-T-DK | 功能描述:A4984 - Power Management, Motor Control, Stepper Evaluation Board 制造商:allegro microsystems, llc 系列:- 零件状态:有效 主要用途:电源管理,电机控制,步进控制器 嵌入式:否 使用的 IC/零件:A4984 主要属性:- 辅助属性:- 所含物品:板 标准包装:1 |
| APEK4985SLP-01-T | 功能描述:Board Eval Motor Control A4985 RoHS:是 类别:编程器,开发系统 >> 评估演示板和套件 系列:- 标准包装:1 系列:PSoC® 主要目的:电源管理,热管理 嵌入式:- 已用 IC / 零件:- 主要属性:- 次要属性:- 已供物品:板,CD,电源 |
| APEK4985SLP-01-T-DK | 功能描述:A4985 - Power Management, Motor Control, Stepper Evaluation Board 制造商:allegro microsystems, llc 系列:- 零件状态:有效 主要用途:电源管理,电机控制,步进控制器 嵌入式:否 使用的 IC/零件:A4985 主要属性:- 辅助属性:- 所含物品:板 标准包装:1 |
| APEK4986SLP-01-T | 功能描述:Board Eval Motor Control A4986 RoHS:是 类别:编程器,开发系统 >> 评估演示板和套件 系列:- 标准包装:1 系列:PSoC® 主要目的:电源管理,热管理 嵌入式:- 已用 IC / 零件:- 主要属性:- 次要属性:- 已供物品:板,CD,电源 |
发布紧急采购,3分钟左右您将得到回复。