- 您现在的位置:买卖IC网 > PDF目录11581 > MCP2510T-I/ST (Microchip Technology)IC CAN CONTROLLER W/SPI 20-TSSOP PDF资料下载
参数资料
| 型号: | MCP2510T-I/ST |
| 厂商: | Microchip Technology |
| 文件页数: | 69/80页 |
| 文件大小: | 0K |
| 描述: | IC CAN CONTROLLER W/SPI 20-TSSOP |
| 标准包装: | 2,500 |
| 控制器类型: | CAN 接口 |
| 接口: | SPI |
| 电源电压: | 3 V ~ 5.5 V |
| 电流 - 电源: | 10mA |
| 工作温度: | -40°C ~ 85°C |
| 安装类型: | 表面贴装 |
| 封装/外壳: | 20-TSSOP(0.173",4.40mm 宽) |
| 供应商设备封装: | 20-TSSOP |
| 包装: | 带卷 (TR) |
| 配用: | DV251001-ND - KIT DEVELOPMENT CAN MCP2510 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页当前第69页第70页第71页第72页第73页第74页第75页第76页第77页第78页第79页第80页
2009 Microchip Technology Inc.
DS39637D-page 71
PIC18F2480/2580/4480/4580
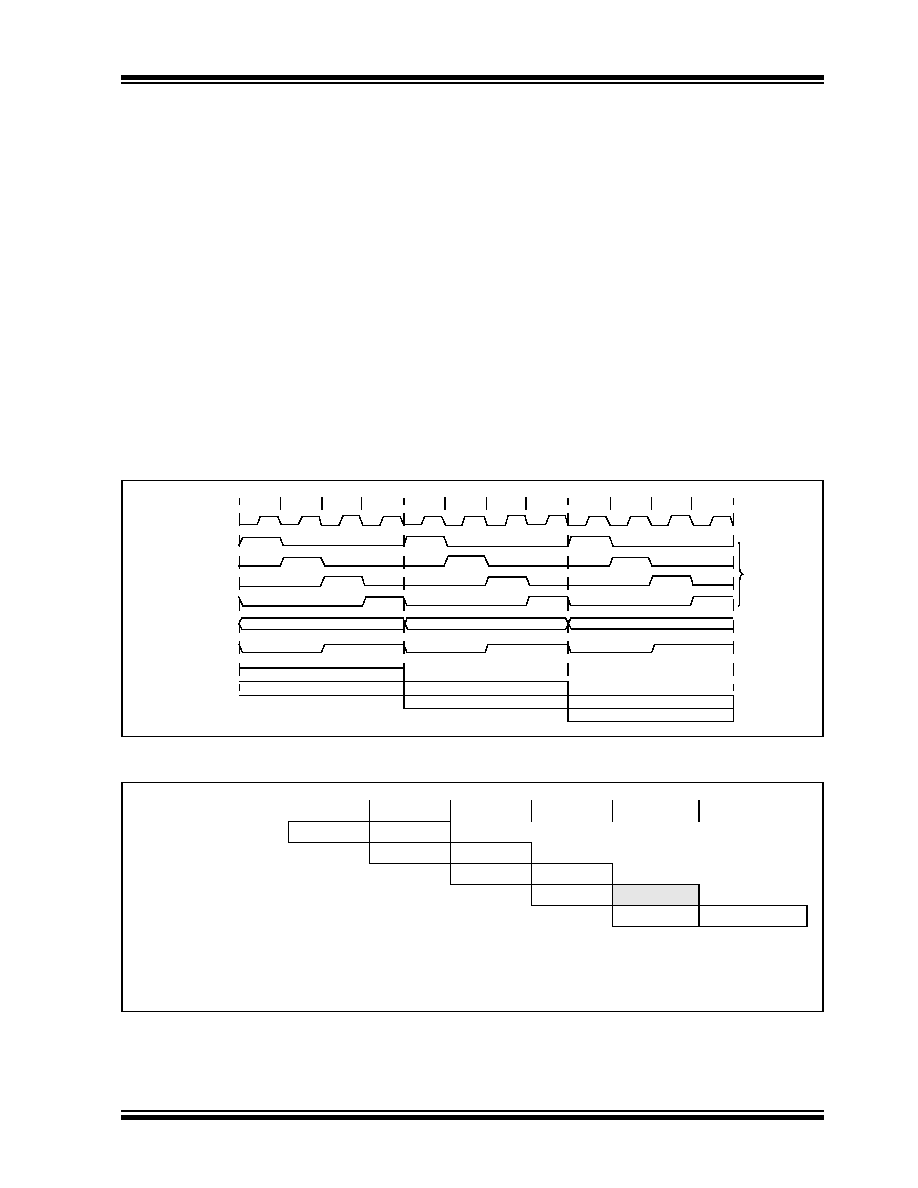
6.2
PIC18 Instruction Cycle
6.2.1
CLOCKING SCHEME
The microcontroller clock input, whether from an inter-
nal or external source, is internally divided by four to
generate four non-overlapping quadrature clocks (Q1,
Q2, Q3 and Q4). Internally, the Program Counter (PC)
is incremented on every Q1; the instruction is fetched
from the program memory and latched into the Instruc-
tion Register (IR) during Q4. The instruction is decoded
and executed during the following Q1 through Q4. The
clocks and instruction execution flow are shown in
6.2.2
INSTRUCTION FLOW/PIPELINING
An “Instruction Cycle” consists of four Q cycles: Q1
through Q4. The instruction fetch and execute are
pipelined in such a manner that a fetch takes one
instruction cycle, while the decode and execute take
another instruction cycle. However, due to the
pipelining, each instruction effectively executes in one
cycle. If an instruction causes the program counter to
change (e.g., GOTO), then two cycles are required to
complete the instruction (Example 6-3).
A fetch cycle begins with the program counter
incrementing in Q1.
In the execution cycle, the fetched instruction is latched
into the Instruction Register (IR) in cycle Q1. This
instruction is then decoded and executed during the
Q2, Q3 and Q4 cycles. Data memory is read during Q2
(operand read) and written during Q4 (destination
write).
FIGURE 6-3:
CLOCK/INSTRUCTION CYCLE
EXAMPLE 6-3:
INSTRUCTION PIPELINE FLOW
Q1
Q2
Q3
Q4
Q1
Q2
Q3
Q4
Q1
Q2
Q3
Q4
OSC1
Q1
Q2
Q3
Q4
PC
OSC2/CLKO
(RC mode)
PC
PC + 2
PC + 4
Fetch INST (PC)
Execute INST (PC – 2)
Fetch INST (PC + 2)
Execute INST (PC)
Fetch INST (PC + 4)
Execute INST (PC + 2)
Internal
Phase
Clock
Note:
All instructions are single cycle, except for any program branches. These take two cycles since the
fetch instruction is “flushed” from the pipeline while the new instruction is being fetched and then
executed.
TCY0TCY1TCY2TCY3TCY4TCY5
1. MOVLW 55h
Fetch 1
Execute 1
2. MOVWF PORTB
Fetch 2
Execute 2
3. BRA
SUB_1
Fetch 3
Execute 3
4. BSF
PORTA, BIT3 (Forced NOP)
Fetch 4
Flush (NOP)
5. Instruction @ address SUB_1
Fetch SUB_1 Execute SUB_1
相关PDF资料 |
PDF描述 |
|---|---|
| VI-JNL-IW-F3 | CONVERTER MOD DC/DC 28V 100W |
| VI-JNL-IW-F1 | CONVERTER MOD DC/DC 28V 100W |
| VI-JNK-IW-F3 | CONVERTER MOD DC/DC 40V 100W |
| VI-JNJ-IW-F2 | CONVERTER MOD DC/DC 36V 100W |
| ENC28J60T-I/ML | IC ETHERNET CTRLR W/SPI 28-QFN |
相关代理商/技术参数 |
参数描述 |
|---|---|
| MCP2515 | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller With SPI Interface |
| MCP2515_12 | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPI Interface |
| MCP2515DM-BM | 功能描述:网络开发工具 CAN Bus Monitor Demo Board RoHS:否 制造商:Rabbit Semiconductor 产品:Development Kits 类型:Ethernet to Wi-Fi Bridges 工具用于评估:RCM6600W 数据速率:20 Mbps, 40 Mbps 接口类型:802.11 b/g, Ethernet 工作电源电压:3.3 V |
| MCP2515DM-PCTL | 功能描述:网络开发工具 MCP2515 CAN Cont PICtail Demo Brd RoHS:否 制造商:Rabbit Semiconductor 产品:Development Kits 类型:Ethernet to Wi-Fi Bridges 工具用于评估:RCM6600W 数据速率:20 Mbps, 40 Mbps 接口类型:802.11 b/g, Ethernet 工作电源电压:3.3 V |
| MCP2515DM-PTPLS | 功能描述:子卡和OEM板 MCP2515 PICTail Plus Daughtr Brd RoHS:否 制造商:BeagleBoard by CircuitCo 产品:BeagleBone LCD4 Boards 用于:BeagleBone - BB-Bone - Open Source Development Kit |
发布紧急采购,3分钟左右您将得到回复。