- 您现在的位置:买卖IC网 > PDF目录15503 > MIC2186YM (Micrel Inc)IC REG CTRLR BST FLYBK CM 16SOIC PDF资料下载
参数资料
| 型号: | MIC2186YM |
| 厂商: | Micrel Inc |
| 文件页数: | 10/15页 |
| 文件大小: | 0K |
| 描述: | IC REG CTRLR BST FLYBK CM 16SOIC |
| 标准包装: | 48 |
| PWM 型: | 电流模式 |
| 输出数: | 1 |
| 频率 - 最大: | 440kHz |
| 占空比: | 85% |
| 电源电压: | 2.9 V ~ 14 V |
| 降压: | 无 |
| 升压: | 是 |
| 回扫: | 是 |
| 反相: | 无 |
| 倍增器: | 无 |
| 除法器: | 无 |
| Cuk: | 无 |
| 隔离: | 无 |
| 工作温度: | -40°C ~ 125°C |
| 封装/外壳: | 16-SOIC(0.154",3.90mm 宽) |
| 包装: | 管件 |
| 产品目录页面: | 1092 (CN2011-ZH PDF) |
| 其它名称: | 576-1715-5 MIC2186YM-ND |
�� �
�
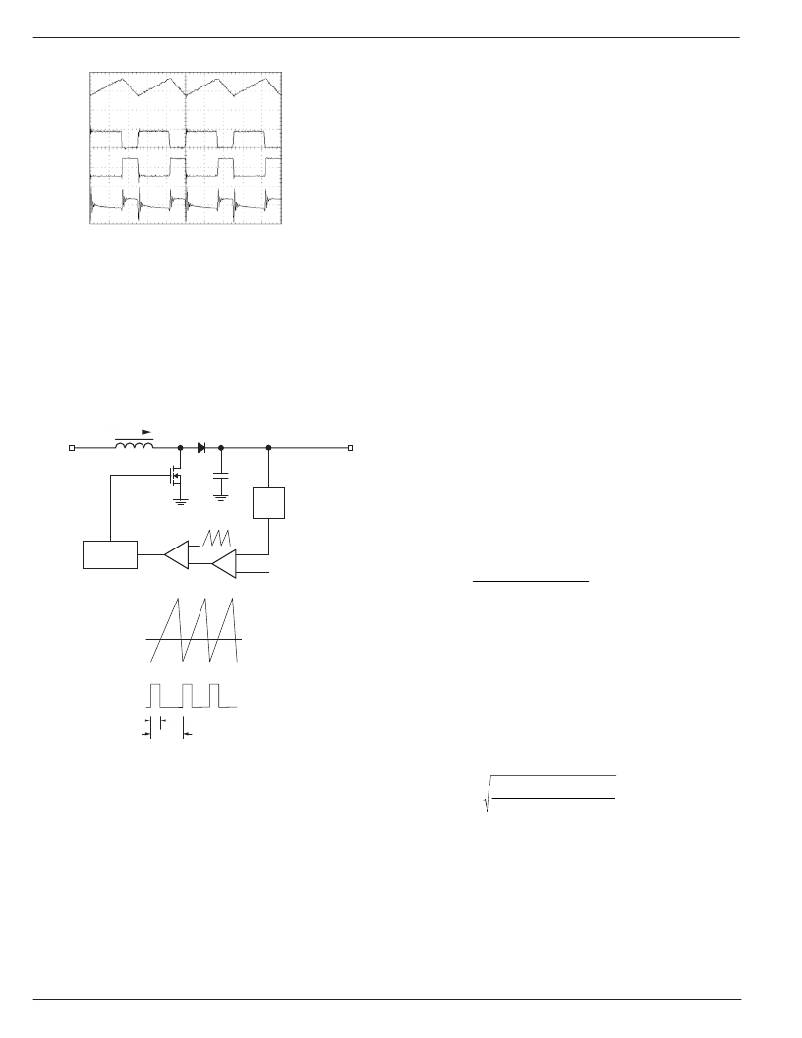
�MIC2186�
�PWM� Mode� Waveforms�
�Micrel,� Inc.�
�the� COMP� pin� (pin� 4)� to� provide� access� to� the� output� of� the�
�error� amplifier.� This� allows� the� use� of� external� components� to�
�Conditions:�
�V� IN� =� 3V�
�V� O� =� 9V�
�I� O� =� 0.6A�
�TIME� (1� μ� s/div)�
�Inductor� Current� @�
�1A/div�
�MOSFET� gate�
�drive� @� 10V/div�
�Switch� Node� Voltage�
�(MOSFET� Drain)�
�@10V/div�
�VOUT� Ripple� Voltage�
�@50mV/div�
�stabilize� the� voltage� loop.�
�Current� Sensing� and� Overcurrent� Protection�
�The� inductor� current� is� sensed� during� the� switch� on� time� by�
�a� current� sense� resistor� located� between� the� source� of� the�
�MOSFET� and� ground� (Rsense� in� Figure� 1).� Exceeding� the�
�current� limit� threshold� will� immediately� terminate� the� gate�
�drive� of� the� N-channel� MOSFET,� Q1.� This� forces� the� Q1� to�
�operate� at� a� reduced� duty� cycle,� which� lowers� the� output�
�voltage.� In� a� boost� converter,� the� overcurrent� limit� will� not�
�protect� the� power� supply� or� load� during� a� severe�
�overcurrent� condition� or� short� circuit� condition.� If� the�
�Figure� 5� -� PWM� mode� waveforms�
�The� MIC2186� uses� current� mode� control� to� improve� output�
�regulation� and� simplify� compensation� of� the� control� loop.�
�Current� mode� control� senses� both� the� output� voltage� (outer�
�loop)� and� the� inductor� current� (inner� loop).� It� uses� the� inductor�
�current� and� output� voltage� to� determine� the� duty� cycle� (D)� of�
�the� buck� converter.� Sampling� the� inductor� current� effectively�
�removes� the� inductor� from� the� control� loop,� which� simplifies�
�compensation.� A� simplified� current� mode� control� diagram� is�
�shown� in� Figure� 6.�
�I_inductor�
�V� IN�
�Voltage�
�Divider�
�I_inductor�
�output� is� short-circuited� to� ground,� current� will� flow� from� the�
�input,� through� the� inductor� and� output� diode� to� ground.� Only�
�the� impedance� of� the� source� and� components� limits� the�
�current.�
�The� mode� of� operation� (continuous� or� discontinuous),� the�
�minimum� input� voltage,� maximum� output� power� and� the�
�minimum� value� of� the� current� limit� threshold� determine� the�
�value� of� the� current� sense� resistor.� Discontinuous� mode� is�
�where� all� the� energy� in� the� inductor� is� delivered� to� the� output�
�at� each� switching� cycle.� Continuous� mode� of� operation�
�occurs� when� current� always� flows� in� the� inductor,� during� both�
�the� low-side� MOSFET� on� and� off� times.� The� equations� below�
�will� help� to� determine� the� current� sense� resistor� value� for�
�each� operating� mode.�
�The� critical� value� of� output� current� in� a� boost� converter� is�
�calculated� below.� The� operating� mode� is� discontinuous� if� the�
�output� current� is� below� this� value� and� is� continuous� if� above�
�this� value.�
�Gate� Driver�
�I_inductor�
�I_inductor�
�V� REF�
�I� CRIT� =�
�V� IN2� ×� (� V� O� ?� V� IN� )� ×� η�
�2� � fs� � L� � V� O� 2�
�where:�
�V� COMP�
�Gate� Drive� at� OutN�
�T� ON�
�T� PER�
�Figure� 6:� PWM� Control� Loop�
�η� is� the� efficiency� of� the� boost� converter�
�Vin� is� the� minimum� input� voltage�
�L� is� the� value� of� the� boost� inductor�
�Fs� is� the� switching� frequency�
�Vo� is� the� output� voltage�
�Maximum� Peak� Current� in� Discontinuous� Mode:�
�The� peak� inductor� current� is:�
�2� ×� I� O� (� O� ?� η� ×� V� IN�
�A block diagram of the MIC2186 PWM current mode control�
�loop� is� shown� in� Figure� 1.� The� inductor� current� is� sensed� by�
�measuring� the� voltage� across� a� resistor,� Rsense.� The� current�
�I� IND(pk)� =�
�� V�
�L� � fs�
�)�
�sense� amplifier� buffers� and� amplifies� this� signal.� A� ramp� is�
�added� to� this� signal� to� provide� slope� compensation,� which� is�
�required� in� current� mode� control� to� prevent� unstable� opera-�
�tion� at� duty� cycles� greater� than� 50%.�
�A� transconductance� amplifier� is� used� as� an� error� amplifier,�
�which� compares� an� attenuated� output� voltage� with� a� refer-�
�ence� voltage.� The� output� of� the� error� amplifier� is� compared� to�
�the� current� sense� waveform� in� the� PWM� block.� When� the�
�current� signal� rises� above� the� error� voltage,� the� comparator�
�turns� off� the� low� side� drive.� The� error� signal� is� brought� out� to�
�where:�
�Io� is� the� maximum� output� current�
�Vo� is� the� output� voltage�
�Vin� is� the� minimum� input� voltage�
�L� is� the� value� of� the� boost� inductor�
�fs� is� the� switching� frequency�
�η� is� the� efficiency� of� the� boost� converter�
�The� maximum� value� of� current� sense� resistor� is:�
�M9999-042205�
�10�
�April� 2005�
�相关PDF资料 |
PDF描述 |
|---|---|
| MIC2185YM | IC REG CTRLR BST PWM CM 16-SOIC |
| MIC2184YM | IC REG CTRLR BUCK PWM CM 16-SOIC |
| SPD62-472M | INDUCTOR PWR SHIELDED 4.70UH SMD |
| LT3757IDD#PBF | IC REG CTRLR BST FLYBK INV 10DFN |
| MIC2182-5.0YM | IC REG CTRLR BUCK PWM CM 16-SOIC |
相关代理商/技术参数 |
参数描述 |
|---|---|
| MIC2186YM TR | 功能描述:DC/DC 开关控制器 SO-16 Low Vin Synchronous Buck PWM Control IC (Lead Free) RoHS:否 制造商:Texas Instruments 输入电压:6 V to 100 V 开关频率: 输出电压:1.215 V to 80 V 输出电流:3.5 A 输出端数量:1 最大工作温度:+ 125 C 安装风格: 封装 / 箱体:CPAK |
| MIC2186YQS | 功能描述:DC/DC 开关控制器 SO-16 Low Vin Synchronous Buck PWM Control IC (Lead Free) RoHS:否 制造商:Texas Instruments 输入电压:6 V to 100 V 开关频率: 输出电压:1.215 V to 80 V 输出电流:3.5 A 输出端数量:1 最大工作温度:+ 125 C 安装风格: 封装 / 箱体:CPAK |
| MIC2186YQS TR | 功能描述:DC/DC 开关控制器 SO-16 Low Vin Synchronous Buck PWM Control IC (Lead Free) RoHS:否 制造商:Texas Instruments 输入电压:6 V to 100 V 开关频率: 输出电压:1.215 V to 80 V 输出电流:3.5 A 输出端数量:1 最大工作温度:+ 125 C 安装风格: 封装 / 箱体:CPAK |
| MIC2193 | 制造商:MICREL 制造商全称:Micrel Semiconductor 功能描述:400KHZ SO 8 SYNCHRONOUS BUCK CONTROL IC |
| MIC2193BM | 功能描述:IC REG CTRLR BUCK PWM CM 8-SOIC RoHS:否 类别:集成电路 (IC) >> PMIC - 稳压器 - DC DC 切换控制器 系列:- 标准包装:4,000 系列:- PWM 型:电压模式 输出数:1 频率 - 最大:1.5MHz 占空比:66.7% 电源电压:4.75 V ~ 5.25 V 降压:是 升压:无 回扫:无 反相:无 倍增器:无 除法器:无 Cuk:无 隔离:无 工作温度:-40°C ~ 85°C 封装/外壳:40-VFQFN 裸露焊盘 包装:带卷 (TR) |
发布紧急采购,3分钟左右您将得到回复。