- 您现在的位置:买卖IC网 > Datasheet目录45 > MIC5191BMM TR (Micrel Inc)IC REG CTRLR SGL POS ADJ 10-MSOP Datasheet资料下载
参数资料
| 型号: | MIC5191BMM TR |
| 厂商: | Micrel Inc |
| 文件页数: | 9/15页 |
| 文件大小: | 845K |
| 描述: | IC REG CTRLR SGL POS ADJ 10-MSOP |
| 标准包装: | 2,500 |
| 类型: | 正,可调式 |
| 输出数: | 1 |
| 输出电压: | 可调 |
| 电流 - 电源: | 15mA |
| 输入电压: | 1 V ~ 5.5 V |
| 工作温度: | -40°C ~ 125°C |
| 封装/外壳: | 10-TFSOP,10-MSOP(0.118",3.00mm 宽) |
| 供应商设备封装: | 10-MSOP |
| 包装: | 带卷 (TR) |
| 其它名称: | MIC5191BMMTR MIC5191BMMTR-ND |
Micrel, Inc.
MIC5191
December 2006
9
M9999-122206
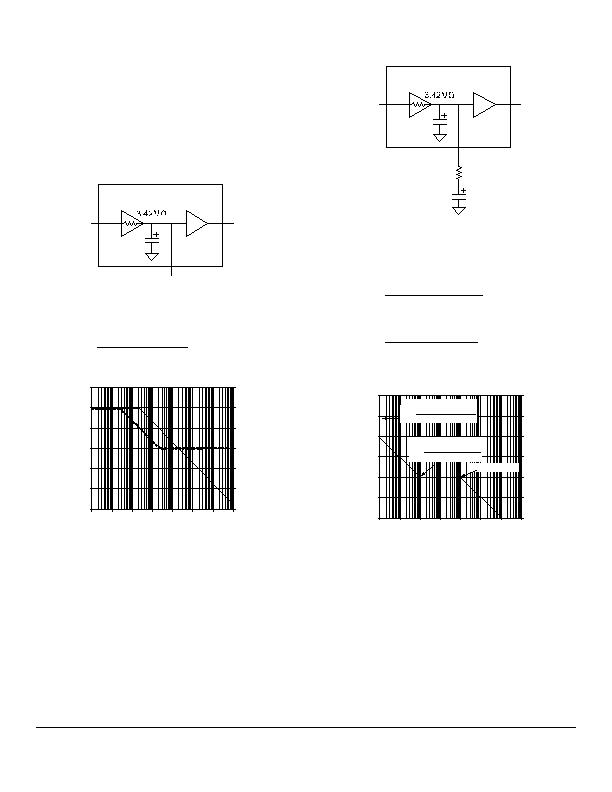
Compensation
The MIC5191 allows the flexibility of externally
controlling the gain and bandwidth. This allows the
MIC5191 design to be tailored to each individual design.
In designing the MIC5191, it is important to maintain
adequate phase margin. This is generally achieved by
having the gain cross the 0dB point with a single pole
20dB/decad roll-off. The compensation pin is configured
as Figure 3 demonstrates.
Error Amplifier
Driver
20pF
Internal
External
Comp
Figure 3. Internal Compensation
This places a pole at 2.3 kHz at 80dB and calculates as
follows.
20pF
3.42M&
2
1
F
P
?/DIV>
?/DIV>
=
?/DIV>
F
P
= 2.32kHz
-20
0
20
40
60
80
100
0.01
0.1
1
10
100
1000 10000 100000
Frequency (KHz)
-45
0
45
90
135
180
225
Figure 4. Internal Compensation
Frequency Response
There is single pole roll off. For most applications, an
output capacitor is required. The output capacitor and
load resistance create another pole. This causes a two-
pole system and can potentially cause design instability
with inadequate phase margin. What should we do?
Answer: we compensate it externally. By providing a
dominant pole and zeroallowing the output capacitor
and load to provide the final polea net single pole roll
off is created, with the zero canceling the dominant pole.
Figure 5 demonstrates:
Error Amplifier
Driver
20pF
Internal
External
Comp
R
COMP
C
COMP
Figure 5. External Compensation
Placing an external capacitor (C
COMP
) and resistor
(R
COMP
) for the external pole-zero combination. Where
the dominant pole can be calculated as follows:
COMP
P
C
3.42M&
2
1
F
?/DIV>
?/DIV>
=
?/DIV>
And the zero can be calculated as follows:
COMP
COMP
Z
C
R
2
1
F
?/DIV>
?/DIV>
=
?/DIV>
This allows for high DC gain, and high bandwidth with
the output capacitor and the load providing the final pole.
-20
0
20
40
60
80
100
0.01
0.1
1
10
100
1000 10000 100000
Frequency (KHz)
-45
0
45
90
135
180
225
The Dominant Pole
External Zero
R
load
x C
out
Pole
Ccomp
M
Fp
?/DIV>
?nbsp 42
.
3
2
1
Ccomp
Rcomp
Fz
?/DIV>
?/DIV>
2
1
Figure 6. External Compensation
Frequency Response
It is recommended that the gain bandwidth should be
designed to be less than 1 MHz. This is because most
capacitors lose capacitance at high frequency and
becoming resistive or inductive. This can be difficult to
compensate for and can create high frequency ringing or
worse, oscillations.
By increasing the amount of output capacitance,
transient response can be improved in multiple ways.
First, the rate of voltage drop vs. time is decreased.
Also, by increasing the output capacitor, the pole formed
by the load and the output capacitor decreases in
frequency. This allows for the increasing of the
相关PDF资料 |
PDF描述 |
|---|---|
| ML4800CP | IC PFC CTRLR AVERAGE CURR 16DIP |
| ML4824CS2 | IC PFC PWM CTRLR COMBO 16-SOIC |
| MX536AJCWE+ | IC CONV TRUE RMS-DC 2MHZ 16SOIC |
| MX884HTTR | IC CURRENT MONITOR TSOT23-6 |
| NCP1080DEG | IC CONV CTLR POE-PD 13W 20-TSSOP |
相关代理商/技术参数 |
参数描述 |
|---|---|
| MIC5191YML | 制造商:MICREL 制造商全称:Micrel Semiconductor 功能描述:Ultra High-Speed, High-Current Active Filter / LDO Controller |
| MIC5191YML TR | 功能描述:低压差控制器 - LDO Ultra Hi-Speed Hi-Current Active Filter/LDO Controller(Lead Free) RoHS:否 制造商:Micrel 最大输入电压:5.5 V 输出电压:Adjustable 输出电流:10 mA 负载调节: 输出类型:Adjustable, Fixed 输出端数量:1 最大工作温度:+ 125 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23-6 |
| MIC5191YML-TR | 功能描述:Linear Regulator Controller IC Positive Adjustable 1 Output 10-MLF? (3x3) 制造商:microchip technology 系列:- 包装:* 零件状态:停产 类型:正,可调式 输出数:1 电流 - 电源:15mA 电压 - 输入:1 V ~ 5.5 V 工作温度:-40°C ~ 125°C 封装/外壳:10-VFDFN 裸露焊盘,10-MLF? 供应商器件封装:10-MLF?(3x3) 标准包装:1 |
| MIC5191YMM | 功能描述:低压差控制器 - LDO Ultra Hi-Speed Hi-Current Active Filter/LDO Controller(Lead Free) RoHS:否 制造商:Micrel 最大输入电压:5.5 V 输出电压:Adjustable 输出电流:10 mA 负载调节: 输出类型:Adjustable, Fixed 输出端数量:1 最大工作温度:+ 125 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23-6 |
| MIC5191YMM TR | 功能描述:低压差控制器 - LDO Ultra Hi-Speed Hi-Current Active Filter/LDO Controller(Lead Free) RoHS:否 制造商:Micrel 最大输入电压:5.5 V 输出电压:Adjustable 输出电流:10 mA 负载调节: 输出类型:Adjustable, Fixed 输出端数量:1 最大工作温度:+ 125 C 安装风格:SMD/SMT 封装 / 箱体:SOT-23-6 |
发布紧急采购,3分钟左右您将得到回复。