- 您现在的位置:买卖IC网 > PDF目录98265 > TMC222-SI STEPPER MOTOR CONTROLLER, PDSO20 PDF资料下载
参数资料
| 型号: | TMC222-SI |
| 元件分类: | 运动控制电子 |
| 英文描述: | STEPPER MOTOR CONTROLLER, PDSO20 |
| 封装: | SOIC-20 |
| 文件页数: | 1/48页 |
| 文件大小: | 457K |
| 代理商: | TMC222-SI |
当前第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页
TMC222 DATASHEET (V. 1.12 / March 7, 2011)
1
Copyright 2004-2009 TRINAMIC Motion Control GmbH & Co. KG
TMC222 – DATASHEET
Micro Stepping Stepper Motor
Controller / Driver with Two Wire Serial Interface
TRINAMIC Motion Control GmbH & Co. KG
Waterloohain 5
D – 22769 Hamburg
GERMANY
www.trinamic.com
1
Features
The TMC222 is a combined micro-stepping stepper motor motion controller and driver with RAM and
OTP memory. The RAM or OTP memory is used to store motor parameters and configuration settings.
The TMC222 allows up to four bit of micro stepping and a coil current of up to 800 mA. After
initialization it performs all time critical tasks autonomously based on target positions and velocity
parameters. Communications to a host takes place via a two wire serial interface. Together with an
inexpensive micro controller the TMC222 forms a complete motion control system. The main benefits
of the TMC222 are:
Motor driver
Controls one stepper motor with four bit micro stepping
Programmable Coil current up to 800 mA
Supply voltage range operating range 8V ... 29V
Fixed frequency PWM current control with automatic selection of fast and slow decay mode
Full step frequencies up to 1 kHz
High temperature, open circuit, short, over-current and under-voltage diagnostics
Motion controller
Internal 16-bit wide position counter
Configurable speed and acceleration settings
Build-in ramp generator for autonomous positioning and speed control
On-the-fly alteration of target position
reference switch input available for read out
Two wire serial interface
Transfer rates up to 350 kbps
Diagnostics and status information as well as motion parameters accessible
Field-programmable node addresses (32)
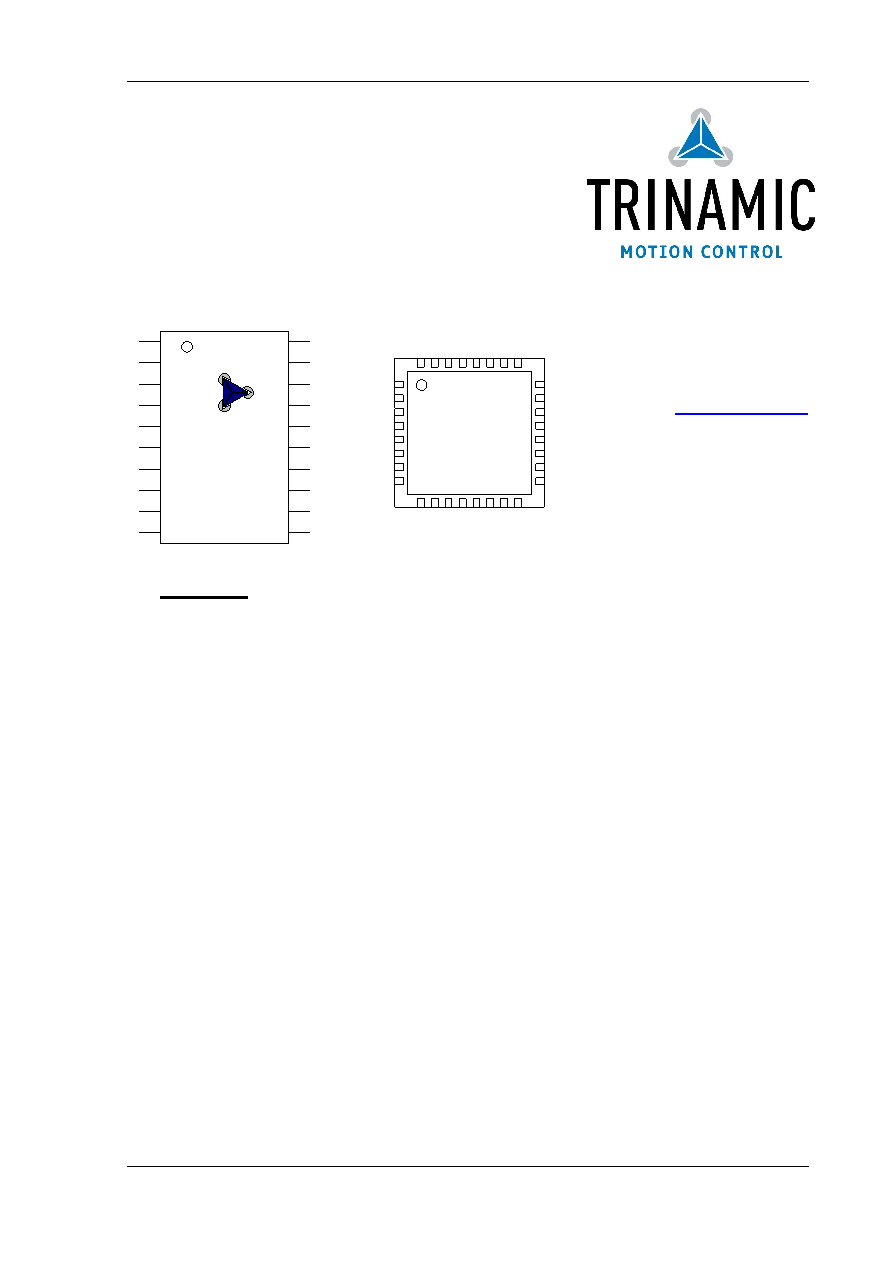
OA1
VBAT
SDA
O
A
2
G
N
D
G
N
D
o
p
e
n
G
N
D
T
S
T
CPN
CPP
VCP
VBAT
OB2
N
C
Top view
SWI
NC
H
W
V
D
S
C
L
G
N
D
O
B
1
O
B
1
O
A
2
G
N
D
G
N
D
32
31
30
29
28
27
26
25
9
10
11
12
13
14
15
16
1
7
1
8
1
9
2
0
2
1
2
3
2
4
1
2
3
4
5
6
7
8
TMC 222
QFN32
T
M
C
2
HW
TST
SWI
CPN
GND
open
GND
SCL
SDA
VDD
OA2
OB1
3
4
5
6
7
8
9
10
15
16
17
20
14
1
2
11
12
13
18
OB2
19
VBAT
GND
CPP
OA1
VBAT
VCP
T
R
IN
A
M
IC
相关PDF资料 |
PDF描述 |
|---|---|
| TMC222-LI | STEPPER MOTOR CONTROLLER, QCC32 |
| TMC222-PI20 | STEPPER MOTOR CONTROLLER, PDSO20 |
| TMC22290R2C | COLOR SIGNAL ENCODER, PQCC44 |
| TMC22291R2C | COLOR SIGNAL ENCODER, PQCC44 |
| TMC2301G8A1 | SPECIALTY CONSUMER CIRCUIT, CPGA68 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| TMC223-EVAL | 制造商:Trinamic 功能描述:EVAL MODULE FOR TMC223 |
| TMC223-LI | 制造商:Trinamic 功能描述: 制造商:Trinamic 功能描述:IC MOTOR CTRLR/DVR I2C 32QFN |
| TMC223-SI | 制造商:Trinamic 功能描述:Bulk |
| TMC2242 WAF | 制造商:Fairchild Semiconductor Corporation 功能描述: |
| TMC2242A | 制造商:FAIRCHILD 制造商全称:Fairchild Semiconductor 功能描述:Digital Half-Band Interpolating/Decimating Filter 12-bit In/16-bit Out, 60 MHz |
发布紧急采购,3分钟左右您将得到回复。