- 您现在的位置:买卖IC网 > PDF目录97995 > L6470HTR (STMICROELECTRONICS) STEPPER MOTOR CONTROLLER, 7 A, PDSO28 PDF资料下载
参数资料
| 型号: | L6470HTR |
| 厂商: | STMICROELECTRONICS |
| 元件分类: | 运动控制电子 |
| 英文描述: | STEPPER MOTOR CONTROLLER, 7 A, PDSO28 |
| 封装: | ROHS COMPLIANT, HTSSOP-28 |
| 文件页数: | 51/64页 |
| 文件大小: | 814K |
| 代理商: | L6470HTR |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页当前第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页
L6470
Programming manual
Doc ID 16737 Rev 2
55/64
9.2.5
Run (DIR, SPD)
The Run command produces a motion at SPD speed; the direction is selected by DIR bit: '1'
forward or '0' reverse. The SPD value is expressed in step/tick (format unsigned fixed point
0.28) that is the same format that SPEED register (see paragraph 9.1.4).
Note:
The SPD value should be lower than MAX_SPEED and greater than MIN_SPEED
otherwise the Run command will be executed at MAX_SPEED or MIN_SPEED respectively.
This command can be given anytime and is immediately executed.
9.2.6
StepClock (DIR)
The StepClock command switches the device in step clock mode (see paragraph 6.7.5) and
impose the forward (DIR = '1') or reverse (DIR = '0') direction.
When the device is in step clock mode the SCK_MOD flag in STATUS register is raised and
Device exits from step clock mode when a constant speed, absolute positioning or motion
command is sent through SPI. Motion direction is imposed by the respective StepClock
command argument and can by changed by a new StepClock command without exiting the
step clock mode.
Events that cause bridges to be forced in high impedance state (overtemperature,
overcurrent, etc.) do not cause the device to leave step clock mode.
This command can only be given when the motor is stopped. If a motion is in progress the
motor should be stopped and then it is possible to send a StepClock command.
Any attempt to perform a StepClock command when the motor is running causes the
command to be ignored and the NOTPERF_CMD flag to rise (see paragraph 9.1.22).
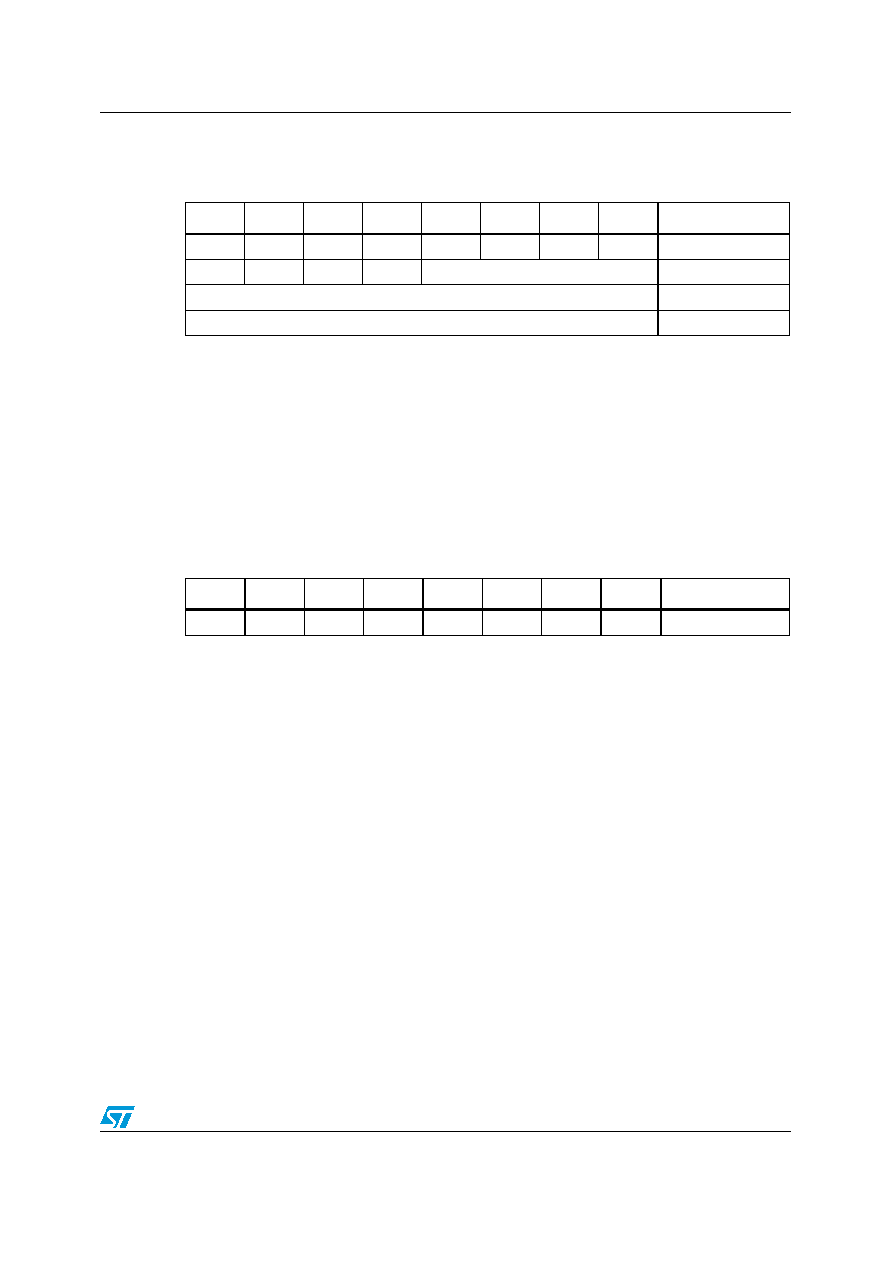
Table 40.
Run command structure
Bit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0
0101000
DIR
from host
XXXX
SPD (Byte 2)
from host
SPD (Byte 1)
from host
SPD (Byte 0)
from host
Table 41.
Stepclock command structure
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0101
100
DIR
from host
相关PDF资料 |
PDF描述 |
|---|---|
| L6562DTR | 0.8 A POWER FACTOR CONTROLLER, PDSO8 |
| L6562D | 0.8 A POWER FACTOR CONTROLLER, PDSO8 |
| L6563HTR | POWER FACTOR CONTROLLER, PDSO16 |
| L6563H | POWER FACTOR CONTROLLER, PDSO16 |
| L6565N | 0.7 A SWITCHING CONTROLLER, PDIP8 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| L6470HTR-CUT TAPE | 制造商:ST 功能描述:L6470H Series 45 V Quad Output dSPIN Microstepping Motor Driver - HTSSOP-28 |
| L6470PD | 功能描述:马达/运动/点火控制器和驱动器 dSPIN 7.0A 8 - 45 V DMOS Motor Driver RoHS:否 制造商:STMicroelectronics 产品:Stepper Motor Controllers / Drivers 类型:2 Phase Stepper Motor Driver 工作电源电压:8 V to 45 V 电源电流:0.5 mA 工作温度:- 25 C to + 125 C 安装风格:SMD/SMT 封装 / 箱体:HTSSOP-28 封装:Tube |
| L6470PDTR | 功能描述:马达/运动/点火控制器和驱动器 dSPIN 7.0A 8 - 45 V DMOS Motor Driver RoHS:否 制造商:STMicroelectronics 产品:Stepper Motor Controllers / Drivers 类型:2 Phase Stepper Motor Driver 工作电源电压:8 V to 45 V 电源电流:0.5 mA 工作温度:- 25 C to + 125 C 安装风格:SMD/SMT 封装 / 箱体:HTSSOP-28 封装:Tube |
| L64710GC-30 | 制造商:未知厂家 制造商全称:未知厂家 功能描述:Encoder/Decoder |
| L64710GC-40 | 制造商:未知厂家 制造商全称:未知厂家 功能描述:Encoder/Decoder |
发布紧急采购,3分钟左右您将得到回复。