- 您现在的位置:买卖IC网 > PDF目录30736 > LC78631E SPECIALTY CONSUMER CIRCUIT, PQFP80 PDF资料下载
参数资料
| 型号: | LC78631E |
| 元件分类: | 消费家电 |
| 英文描述: | SPECIALTY CONSUMER CIRCUIT, PQFP80 |
| 封装: | QFP-80 |
| 文件页数: | 6/34页 |
| 文件大小: | 502K |
| 代理商: | LC78631E |
第1页第2页第3页第4页第5页当前第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页
No. 5342-14/34
LC78631E
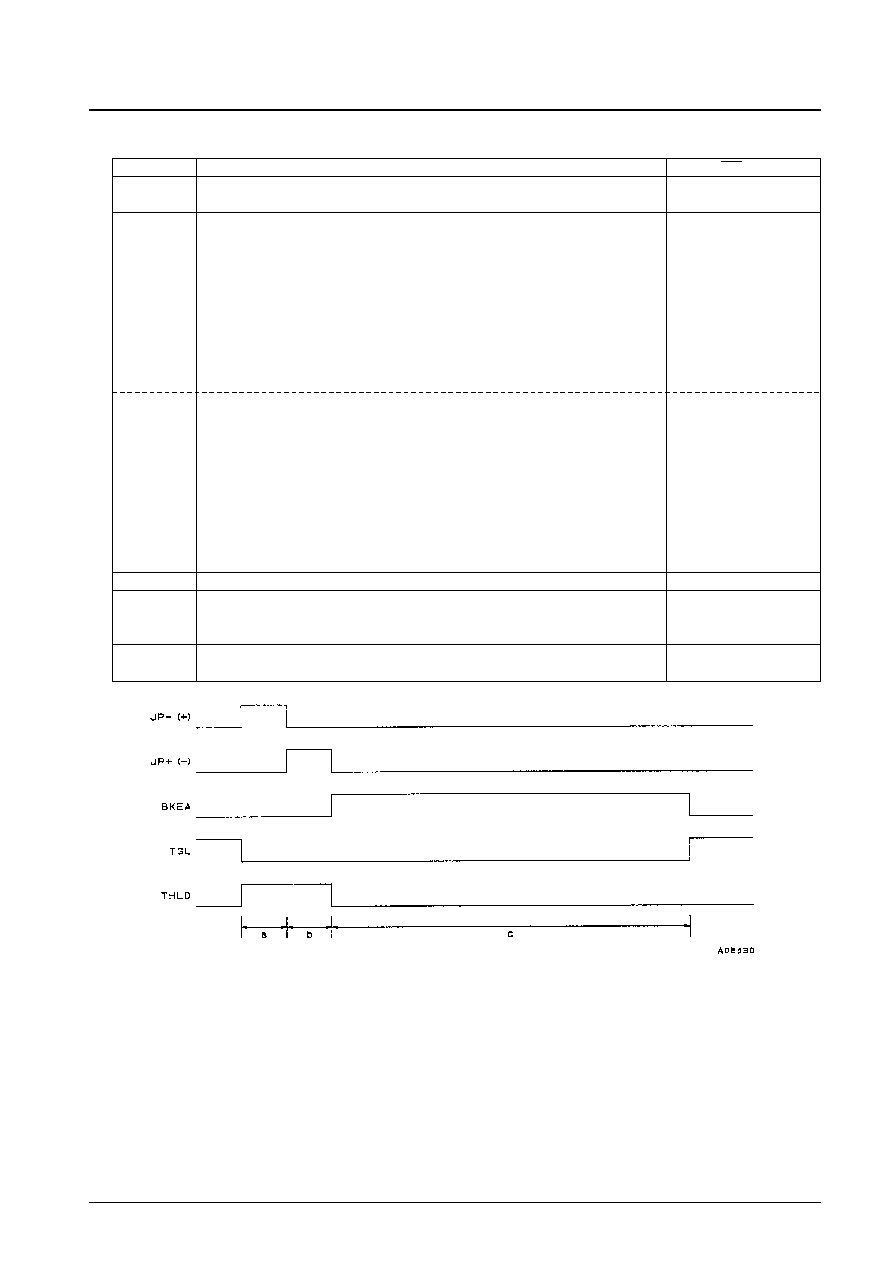
TJ commands
When the LC78631E receives a track jump instruction as a servo command, it first generates accelerating pulses
(period a) and next generates deceleration pulses (period b). The passage of the braking period (period c) completes
the specified jump. During the braking period, the LC78631E detects the beam slip direction from the TES and
HFL inputs. TOFF is used to cut the components in the TES signal that aggravate slip. The jump destination track
is captured by increasing the servo gain with TGL. In THLD period TOFF output mode the TOFF signal is held
high during the period when THLD is high.
Note: Of the modes related to disk motor control, the TOFF pin only goes low in CLV mode, and will be high
during start, stop, and brake operations. Note that the TOFF pin can be turned on and off independently by
microprocessor issued commands. However, this function is only valid when disk motor control is in CLV
mode.
Code
Command
RES = low
$A0
OLD TRACK JUMP
q
$A1
NEW TRACK JUMP
$11
1 TRACK JUMP IN #1
$12
1 TRACK JUMP IN #2
$31
1 TRACK JUMP IN #3
$52
1 TRACK JUMP IN #4
$10
2 TRACK JUMP IN
$13
4 TRACK JUMP IN
$14
16 TRACK JUMP IN
$30
32 TRACK JUMP IN
$15
64 TRACK JUMP IN
$17
128 TRACK JUMP IN
$19
1 TRACK JUMP OUT #1
$1A
1 TRACK JUMP OUT #2
$39
1 TRACK JUMP OUT #3
$5A
1 TRACK JUMP OUT #4
$18
2 TRACK JUMP OUT
$1B
4 TRACK JUMP OUT
$1C
16 TRACK JUMP OUT
$38
32 TRACK JUMP OUT
$1D
64 TRACK JUMP OUT
$1F
128 TRACK JUMP OUT
$16
256 TRACK CHECK
$0F
TOFF
$8F
TON
q
$8C
TRACK JUMP BRAKE
$21
THLD PERIOD TOFF OUTPUT MODE
$20
RESET THLD PERIOD TOFF OUTPUT MODE
q
相关PDF资料 |
PDF描述 |
|---|---|
| LC78637E | SPECIALTY CONSUMER CIRCUIT, PQFP80 |
| LC78647NT | SPECIALTY CONSUMER CIRCUIT, PQFP100 |
| LC78648E | SPECIALTY CONSUMER CIRCUIT, PQFP80 |
| LC78681E | SPECIALTY CONSUMER CIRCUIT, PQFP64 |
| LC78681KE-L | SPECIALTY CONSUMER CIRCUIT, PQFP64 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| LC78632 | 制造商:SANYO 制造商全称:Sanyo Semicon Device 功能描述:Compact Disk Player DSP |
| LC78632RE | 制造商:SANYO 制造商全称:Sanyo Semicon Device 功能描述:Compact Disk Player DSP |
| LC78637E-E | 制造商:ON Semiconductor 功能描述: |
| LC7863KA | 制造商:未知厂家 制造商全称:未知厂家 功能描述: |
| LC78641E | 制造商:未知厂家 制造商全称:未知厂家 功能描述:CD-Player Processor/Controller |
发布紧急采购,3分钟左右您将得到回复。