- 您现在的位置:买卖IC网 > PDF目录65835 > PBL3770ASOT (ERICSSON POWER MODULES AB) STEPPER MOTOR CONTROLLER, 1.8 A, PDSO20 PDF资料下载
参数资料
| 型号: | PBL3770ASOT |
| 厂商: | ERICSSON POWER MODULES AB |
| 元件分类: | 运动控制电子 |
| 英文描述: | STEPPER MOTOR CONTROLLER, 1.8 A, PDSO20 |
| 封装: | SO-20 |
| 文件页数: | 6/8页 |
| 文件大小: | 140K |
| 代理商: | PBL3770ASOT |
PBL 3770A
6
voltage across the sensing resistor is
below the comparator threshold level.
The sinking transistor then turns on
and the motor current starts to increase
again, The cycle is repeated until the
current is turned off via the logic inputs.
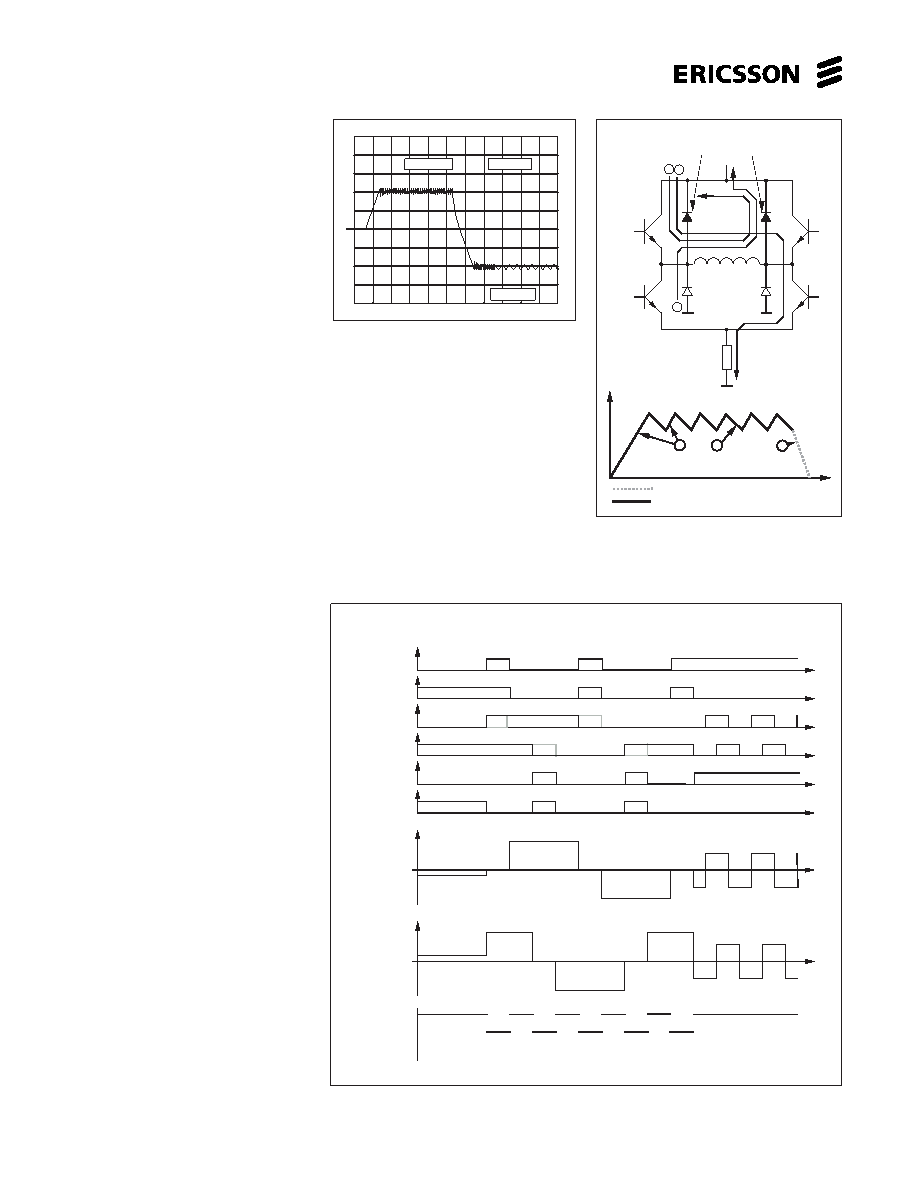
When both I
1 and I0 are high, all four
transistors in the output H-bridge are
turned off, which means that inductive
current recirculates through two opposite
free-wheeling diodes (see figure 6, arrow
3). this method of turning off the current
results in a faster current decay than if
only one transistor was turned off and
will therefore improve speed
performance in half-stepping mode.
Heatsinking
The junction temperature of the chip
highly effects the lifetime of the circuit. In
high-current applications, the
heatsinking must be carefully conside-
red.
The Rth
j-a of the PBL 3770A can be
reduced by soldering the ground pins to
a suitable copper ground plane on the
printed circuit board (see figure 14) or by
applying an external heatsink type V7 or
V8, see figure 14.
The diagram in figure 13 shows the
maximum permissible power dissipation
versus the ambient temperature in
°C,
for heatsinks of the type V7, V8, or a 20
cm
2 copper area respectively. Any
external heatsink or printed circuit board
copper must be connected to electrical
ground.
For motor currents higher than approx
600 mA, some form of heatsinking is
recommended to assure optimal
reliability.
The diagrams in figures 12 and 13 can
be used to determine the required
heatsinking of the circuit. In some
systems, forced-air cooling may be
available to reduce the temperature rise
of the circuit.
Applications Information
Motor selection
Some stepper motors are not designed
for continuous operation at maximum
current. As the circuit drives a constant
current through the motor, its tempera-
ture can increase, both at low- and high-
speed operation.
Some stepper motors have such high
core losses that they are not suited for
switched-mode operation.
Figure 5. Motor current (I
M ),
Vertical : 200 mA/div,
Horizontal: 1 ms/div,
expanded part 100
s/div.
Figure 6. Output stage with current paths
for fast and slow current decay.
Figure 7. Principal operating sequence.
0
200 mA/div
1 ms/div
100
s/div
Fast Current Decay
Slow Current Decay
Motor Current
Time
1
2
3
2 1
External recirculation
diodes
R
S
I
0A
I
1A
Ph
A
Ph
B
I
0B
I
1B
I
MA
I
MB
100%
–100%
60%
–60%
20%
–20%
100%
–100%
60%
–60%
Half step mode at 100 %
Full step mode at 60 %
Stand by mode
at 20 %
Full step position
Half step position
相关PDF资料 |
PDF描述 |
|---|---|
| PBL3770ASOS | STEPPER MOTOR CONTROLLER, 1.8 A, PDSO20 |
| PBL3770AQNT | STEPPER MOTOR CONTROLLER, 1.8 A, PQCC28 |
| PBL3770AQNS | STEPPER MOTOR CONTROLLER, 1.8 A, PQCC28 |
| PBL3770ANS | STEPPER MOTOR CONTROLLER, 1.8 A, PDIP16 |
| PBL3773/1QNT | STEPPER MOTOR CONTROLLER, 0.85 A, PQCC28 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| PBL3771 | 制造商:ERICSSON 制造商全称:Ericsson 功能描述:Precision Stepper Motor Driver |
| PBL3771/1NS | 制造商:ERICSSON 制造商全称:Ericsson 功能描述:Precision Stepper Motor Driver |
| PBL3771/1QNS | 制造商:ERICSSON 制造商全称:Ericsson 功能描述:Precision Stepper Motor Driver |
| PBL3771/1QNT | 制造商:ERICSSON 制造商全称:Ericsson 功能描述:Precision Stepper Motor Driver |
| PBL3771/1SOS | 制造商:ERICSSON 制造商全称:Ericsson 功能描述:Precision Stepper Motor Driver |
发布紧急采购,3分钟左右您将得到回复。