- 您现在的位置:买卖IC网 > PDF目录192180 > RD-19240FS-200 (DATA DEVICE CORP) SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, PQFP52 PDF资料下载
参数资料
| 型号: | RD-19240FS-200 |
| 厂商: | DATA DEVICE CORP |
| 元件分类: | 位置变换器 |
| 英文描述: | SYNCHRO OR RESOLVER TO DIGITAL CONVERTER, PQFP52 |
| 封装: | 10 X 10 MM, PLASTIC, MQFP-52 |
| 文件页数: | 5/19页 |
| 文件大小: | 432K |
| 代理商: | RD-19240FS-200 |
13
Data Device Corporation
www.ddc-web.com
RD-19240
F-0209-0
TABLE 8. A_QUAD_B FUNCTION
A_QUAD_B
U/B
0
B
1
U
TABLE 9. ZIP_EN FUNCTION
ZIP_EN
CB/ZI
0
ZI
1
CB
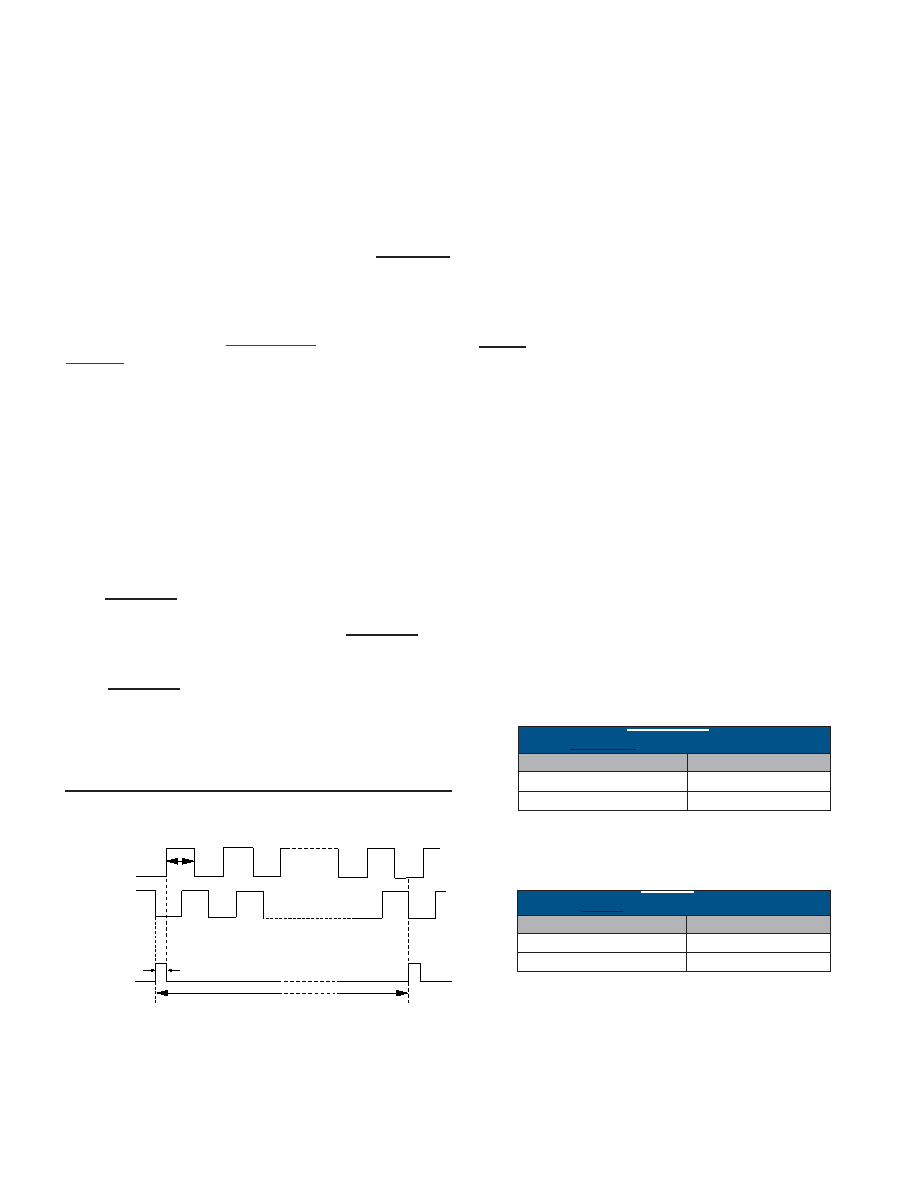
encoder resolution latched into the RD-19240 (refer to
FIGURE 18). The calculations for the timing are:
n = resolution of parallel data
t = 1 / ( 2n* Velocity(RPS))
T = 1 / ( Velocity(RPS))
Note: The Z1 pulse is high when all the bits of the counter
are zero. If the resolution of the counter, (parallel data)
is programmed differently than that of the A_QUAD_B
then the resolution of the counter will determine the
resolution of the ZIP.
CLARIFICATION OF A_QUAD_B, U/B AND
ZIP_EN FUNCTIONS
The RD-19240 is a tracking converter designed with a Type II
closed servo loop. The Type II closed servo loop has an internal
incremental integrator. This integrator acts as an up-down posi-
tion counter. An AC error (e) within the RD-19240 represents the
difference between
θ (current angle to be digitized) and φ (the
angle stored in digital form in the up-down counter). Because the
RD-19240 constitutes in itself a Type II closed loop servomech-
anism, it continuously attempts to null the error to zero. This is
accomplished by counting up or down 1 LSB until
φ is equal to θ
thus having an error of zero.
When A_QUAD_B is logic 0, encoder emulation mode is select-
ed (i.e. The U/B output is programmed to B). The encoder emu-
lator resolution is set on the falling edge of A_QUAD_B (see
TABLE 8).
When A_QUAD_B is logic 1, encoder emulation mode is not
selected (i.e. The U/B output is set to U, which indicates the
direction of the internal position counter).
2t
B(X- or LSB & LSB+1)
A (LSB+1)
ZIP (NRP)
359.95
0
T
t
FIGURE 18. INCREMENTAL ENCODER EMULATION
Note: U indicates the direction of the counter. It stands for
“UP”. If the RD-19240 is at a static angle awaiting a
new angle
θθ,, U indicates the direction the counter was
going to get to the current angle
φφ. As the error is
approaching zero, the internal analog circuitry voltage
may overshoot before settling - which would then indi-
cate an incorrect direction. Because of this overshoot,
the U output should not be relied on after settling to a
static state. Only during active resolver movement will
the U output state be reliable. U is a logic 1 when
going in the positive direction (increasing angle). It is
a logic 0 when going in the negative direction
(decreasing angle).
ZIP_EN chooses between the CB and Zero Index pulse outputs
and is independent of encoder emulation mode. A logic 1
enables the CB pulse, a logic 0 enables the Zero Index pulse
(see TABLE 9).
Note: When the RD-19240 is set for 14-bit mode, the LSB is
bit 14. When the RD-19240 is set for 12-bit mode, the
LSB is bit 12 and bits 13 and 14 are set to logic “0”.
(See TABLE 1, NOTE 1).
EVALUATION CARD
The RD-19240 can be easily evaluated using the RD-19240EX-
300 evaluation card. A manual for this evaluation card is available
for download from www.ddc-web.com.
相关PDF资料 |
PDF描述 |
|---|---|
| RD13UMB | 13 V, 0.15 W, SILICON, UNIDIRECTIONAL VOLTAGE REGULATOR DIODE |
| RD18UMB3 | 18 V, 0.15 W, SILICON, UNIDIRECTIONAL VOLTAGE REGULATOR DIODE |
| RD7.5UMB1 | 7.5 V, 0.15 W, SILICON, UNIDIRECTIONAL VOLTAGE REGULATOR DIODE |
| RD15JSAB | 15 V, 0.4 W, SILICON, UNIDIRECTIONAL VOLTAGE REGULATOR DIODE, DO-34 |
| RD5.6JSAB1 | 5.6 V, 0.4 W, SILICON, UNIDIRECTIONAL VOLTAGE REGULATOR DIODE, DO-34 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| RD1-9320 | 制造商:STMicroelectronics 功能描述:MPU DEMO-BOARD |
| RD1950MPXM2010GS | 制造商:Freescale Semiconductor 功能描述:WATER LEVEL REFERENCE DESIGN - Bulk |
| RD1986MMA2260D | 功能描述:加速传感器开发工具 TRIAX REF DSGN 3-AXIS FOR MMA2260D RoHS:否 制造商:Murata 工具用于评估:SCA3100-D04 加速:2 g 传感轴:Triple Axis 接口类型:SPI 工作电压:3.3 V |
| RD1986MMA6260Q | 功能描述:加速传感器开发工具 TRIAX REF DSGN 3-AXIS FOR NMA6260Q RoHS:否 制造商:Murata 工具用于评估:SCA3100-D04 加速:2 g 传感轴:Triple Axis 接口类型:SPI 工作电压:3.3 V |
| RD1A-12S | 制造商:World Products 功能描述: |
发布紧急采购,3分钟左右您将得到回复。