- 您现在的位置:买卖IC网 > PDF目录200645 > UPD62AMC-XXX-5A4-A 4-BIT, MROM, 4 MHz, MICROCONTROLLER, PDSO20 PDF资料下载
参数资料
| 型号: | UPD62AMC-XXX-5A4-A |
| 元件分类: | 微控制器/微处理器 |
| 英文描述: | 4-BIT, MROM, 4 MHz, MICROCONTROLLER, PDSO20 |
| 封装: | 0.300 INCH, PLASTIC, SSOP-20 |
| 文件页数: | 17/62页 |
| 文件大小: | 272K |
| 代理商: | UPD62AMC-XXX-5A4-A |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页当前第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页
24
PD62A
Data Sheet U14474EJ2V0DS00
Table 5-3. Standby Mode Settings (HALT #b3b2b1b0B) and Release Conditions
Operand Value of
HALT Instruction
Setting Mode
Setting Precondition
Release Condition
b3
b2
b1
b0
0000
STOP
All KI/O pins are high-level output.
High level input to at least one
of KI pins.
0
1
STOP
All KI/O pins are high-level output.
High level input to at least one
of KI pins.
1
0
STOPNote 1
The KI/O0 pin is high-level output.
High level input to at least one
of KI pins.
1
Any combination of
STOP
[The following condition is added in addition to the above.]
b2b1b0 above
—
High level input to at least one
of S0 and S1 pinsNote 2.
0/1
1
0
1
HALT
—
When the timer’s down counter is 0
Notes 1. When setting HALT #
×110B, configure a key matrix by using the KI/O0 pin and the KI pin so that an
internal reset takes effect at the time of program hang-up.
2. At least one of the S0 and S1 pins (the pin used for releasing standby) must be in input mode. (Note
that an internal reset does not take effect even when both pins are in output mode.)
Cautions 1. The internal reset takes effect when the HALT instruction is executed with an operand value
other than that above or when the precondition has not been satisfied when executing the
HALT instruction.
2. If STOP mode is set when the timer’s down counter is not 0 (timer operating), the system
is placed in STOP mode only after all the 10 bits of the timer’s down counter and the timer
output permit flag are cleared to 0.
3. Write the NOP instruction as the first instruction after STOP mode is released.
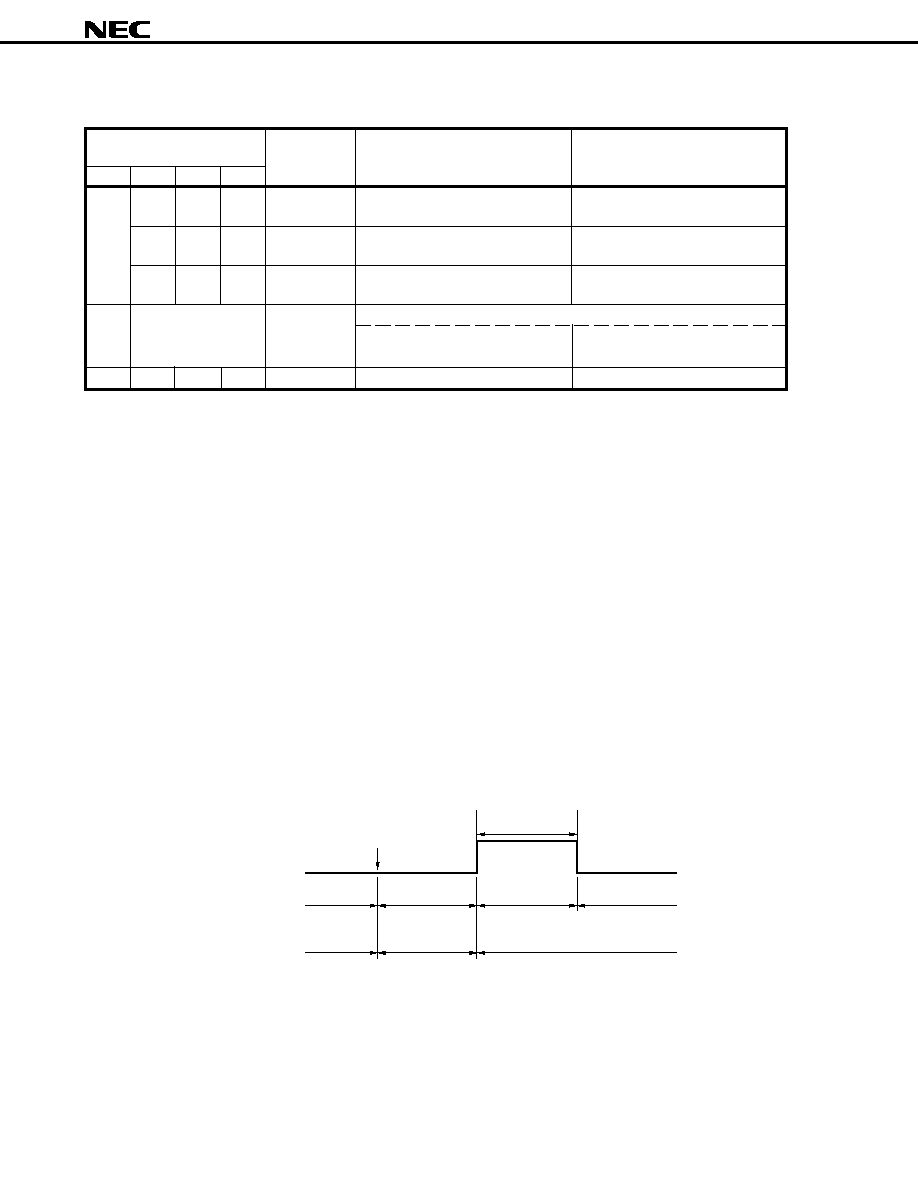
5.3 Standby Mode Release Timing
(1) STOP mode release timing
Figure 5-1. STOP Mode Cancelation by Release Condition
Caution When a release condition is established in the STOP mode, the device is released from the STOP
mode, and goes into a wait state. At this time, if the release condition is not held, the device
goes into STOP mode again after the wait time has elapsed. Therefore, when releasing the STOP
mode, it is necessary to hold the release condition longer than the wait time.
Wait
(52/fX +
α)
HALT mode
Operating
mode
STOP mode
Oscillation
stopped
Oscillation
Operating
mode
Oscillation
HALT instruction
(STOP mode)
Standby
release signal
Clock
α : Oscillation growth time
相关PDF资料 |
PDF描述 |
|---|---|
| UPD703201YGC-XXX-YEU-A | 32-BIT, MROM, 20 MHz, MICROCONTROLLER, PQFP100 |
| UPD703270GF-XXX-JBT | 32-BIT, MROM, 20 MHz, RISC MICROCONTROLLER, PQFP100 |
| UPD70F3008GJ-33-8EU | 32-BIT, FLASH, 33 MHz, MICROCONTROLLER, PQFP144 |
| UPD70F3017AYF1-EA6-A | 32-BIT, FLASH, 20 MHz, MICROCONTROLLER, PBGA121 |
| UPD70F3015BGC-8EU-A | 32-BIT, FLASH, 20 MHz, MICROCONTROLLER, PQFP100 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| UPD62MC | 制造商:NEC 制造商全称:NEC 功能描述:4-BIT SINGLE-CHIP MICROCONTROLLER FOR INFRARED REMOTE CONTROL TRANSMISSION |
| UPD6300C | 制造商:NEC 制造商全称:NEC 功能描述:MOS DIGITAL INTEGRATED CIRCUIT |
| UPD6301 | 制造商:未知厂家 制造商全称:未知厂家 功能描述:ASIC |
| UPD6307 | 制造商:NEC 制造商全称:NEC 功能描述:UPD6307 LCD ROW DRIVER |
| UPD6307G | 制造商:NEC 制造商全称:NEC 功能描述:UPD6307 LCD ROW DRIVER |
发布紧急采购,3分钟左右您将得到回复。