- 您现在的位置:买卖IC网 > PDF目录149382 > L6230QTR (STMICROELECTRONICS) BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, QCC32 PDF资料下载
参数资料
| 型号: | L6230QTR |
| 厂商: | STMICROELECTRONICS |
| 元件分类: | 运动控制电子 |
| 英文描述: | BRUSHLESS DC MOTOR CONTROLLER, 2.8 A, QCC32 |
| 封装: | 5 X 5 MM, 1 MM HEIGHT, 0.50 MM PITCH, ROHS COMPLIANT, VFQFP-32 |
| 文件页数: | 7/24页 |
| 文件大小: | 577K |
| 代理商: | L6230QTR |
L6230
Application information
Doc ID 18094 Rev 2
15/24
6
Application information
Some typical applications using L6230 are shown in this paragraph. A high quality ceramic
capacitor (C2) in the range of 100 nF to 200 nF should be placed between the power pins
VSA and VSB and ground near the L6230 to improve the high frequency filtering on the
power supply and reduce high frequency transients generated by the switching. The
capacitor (CEN) connected from the DIAG-EN input to ground sets the shut down time when
an over current is detected (see overcurrent protection). The current sensing inputs
(SENSEX) should be connected to the sensing resistors RSENSE with a trace length as short
as possible in the layout. The sense resistors should be non-inductive resistors to minimize
the dI/dt transients across the resistors. To increase noise immunity, unused logic pins are
best connected to 5 V (high logic level) or GND (low logic level) (see pin description). It is
recommended to keep power ground and signal ground separated on PCB.
The examples reported describe some typical application to drive a 3-phase BLDC motor
using L6230 device.
In the first example is shown a field oriented control (FOC) system, with this method it is
possible to provide smooth and precise motor control of BLDC motors.
A six-step driving method with current control is reported in the second example, the inputs
sequence is generated by external controller and the L6230 comparator is used to obtain
the information for the peak current control.
Finally, the third example shows how to implement a sensorless motor control system, the
information on rotor position is achieved by BEMF zero-crossing detection.
6.1
Field oriented control driving method
In this configuration (see Figure 14) three sensing resistors are required, one for each
channel. The sensing signals coming from the output power stage are conditioned by
external operational amplifiers which provide the proper feedback signals to the AtoD
converter and the system controller. According to the feedback signals the six input lines are
generated by the controller.
Note that some filtering and level shifting RC networks should be added between the sense
resistor and the correspondent op-amp input.
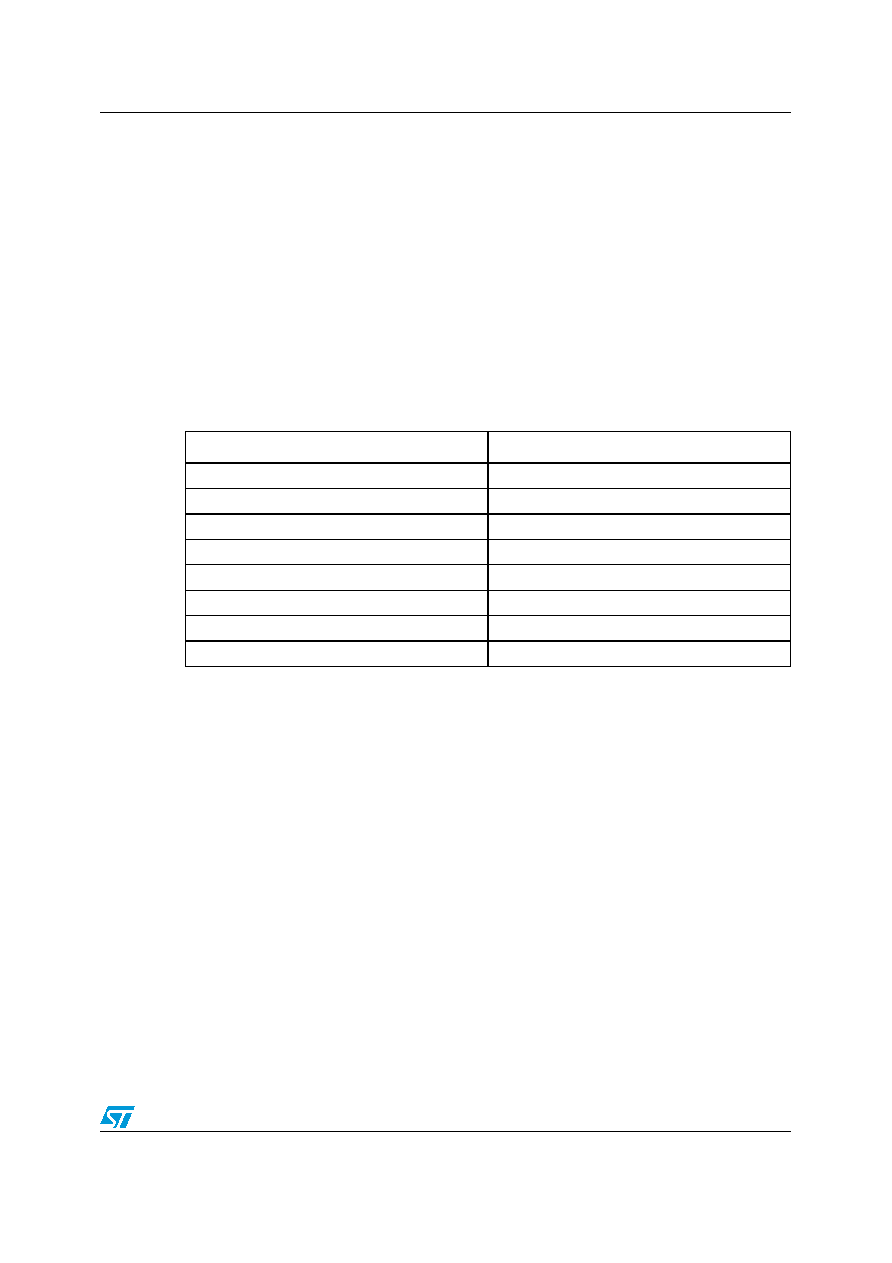
Table 8.
Component values for typical application
Component
Value
C1
100 F
C2
100 nF
CBOOT
220 nF
CEN
5.6 nF
CP
10 nF
D1
1N4148
D2
1N4148
REN
100 k
Ω
相关PDF资料 |
PDF描述 |
|---|---|
| LM4040AIM-2.5 | 1-OUTPUT TWO TERM VOLTAGE REFERENCE, 2.5 V, PDSO8 |
| LM329BZX | 1-OUTPUT TWO TERM VOLTAGE REFERENCE, 6.9 V, PBCY3 |
| L6122 | 3-CHANNEL, SGL POLE SGL THROW SWITCH, PDIP20 |
| LM1001-7EPD1AF | 1-OUTPUT 50 W AC-DC REG PWR SUPPLY MODULE |
| LM1001-7RV2A | 1-OUTPUT 50 W AC-DC REG PWR SUPPLY MODULE |
相关代理商/技术参数 |
参数描述 |
|---|---|
| L6231H | 制造商:未知厂家 制造商全称:未知厂家 功能描述:Industrial Control IC |
| L6232A | 制造商:STMICROELECTRONICS 制造商全称:STMicroelectronics 功能描述:SPINDLE DRIVER |
| L6232B | 制造商:STMICROELECTRONICS 制造商全称:STMicroelectronics 功能描述:SPINDLE DRIVER |
| L6232E | 制造商:STMICROELECTRONICS 制造商全称:STMicroelectronics 功能描述:SPINDLE DRIVER |
| L6233 | 制造商:未知厂家 制造商全称:未知厂家 功能描述:Analog IC |
发布紧急采购,3分钟左右您将得到回复。