- 您现在的位置:买卖IC网 > PDF目录11599 > MCP2510-I/SO (Microchip Technology)IC CAN CONTRLER IND TEMP 18SOIC PDF资料下载
参数资料
| 型号: | MCP2510-I/SO |
| 厂商: | Microchip Technology |
| 文件页数: | 29/80页 |
| 文件大小: | 0K |
| 描述: | IC CAN CONTRLER IND TEMP 18SOIC |
| 产品培训模块: | CAN Bus Protection |
| 标准包装: | 42 |
| 控制器类型: | CAN 接口 |
| 接口: | SPI |
| 电源电压: | 3 V ~ 5.5 V |
| 电流 - 电源: | 10mA |
| 工作温度: | -40°C ~ 85°C |
| 安装类型: | 表面贴装 |
| 封装/外壳: | 18-SOIC(0.295",7.50mm 宽) |
| 供应商设备封装: | 18-SOIC |
| 包装: | 管件 |
| 产品目录页面: | 685 (CN2011-ZH PDF) |
| 配用: | DV251001-ND - KIT DEVELOPMENT CAN MCP2510 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页当前第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页第69页第70页第71页第72页第73页第74页第75页第76页第77页第78页第79页第80页
2007 Microchip Technology Inc.
DS21291F-page 35
MCP2510
5.0
BIT TIMING
All nodes on a given CAN bus must have the same
nominal bit rate. The CAN protocol uses Non Return to
Zero (NRZ) coding which does not encode a clock
within the data stream. Therefore, the receive clock
must be recovered by the receiving nodes and syn-
chronized to the transmitters clock.
As oscillators and transmission time may vary from
node to node, the receiver must have some type of
Phase Lock Loop (PLL) synchronized to data transmis-
sion edges to synchronize and maintain the receiver
clock. Since the data is NRZ coded, it is necessary to
include bit stuffing to ensure that an edge occurs at
least every six bit times, to maintain the Digital Phase
Lock Loop (DPLL) synchronization.
The bit timing of the MCP2510 is implemented using a
DPLL that is configured to synchronize to the incoming
data, and provide the nominal timing for the transmitted
data. The DPLL breaks each bit time into multiple seg-
ments made up of minimal periods of time called the
time quanta (TQ).
Bus timing functions executed within the bit time frame,
such as synchronization to the local oscillator, network
transmission delay compensation, and sample point
positioning, are defined by the programmable bit timing
logic of the DPLL.
All devices on the CAN bus must use the same bit rate.
However, all devices are not required to have the same
master oscillator clock frequency. For the different
clock frequencies of the individual devices, the bit rate
has to be adjusted by appropriately setting the baud
rate prescaler and number of time quanta in each seg-
ment.
The nominal bit rate is the number of bits transmitted
per second assuming an ideal transmitter with an ideal
oscillator, in the absence of resynchronization. The
nominal bit rate is defined to be a maximum of 1 Mb/s.
Nominal Bit Time is defined as:
TBIT = 1 / NOMlNAL BlT RATE
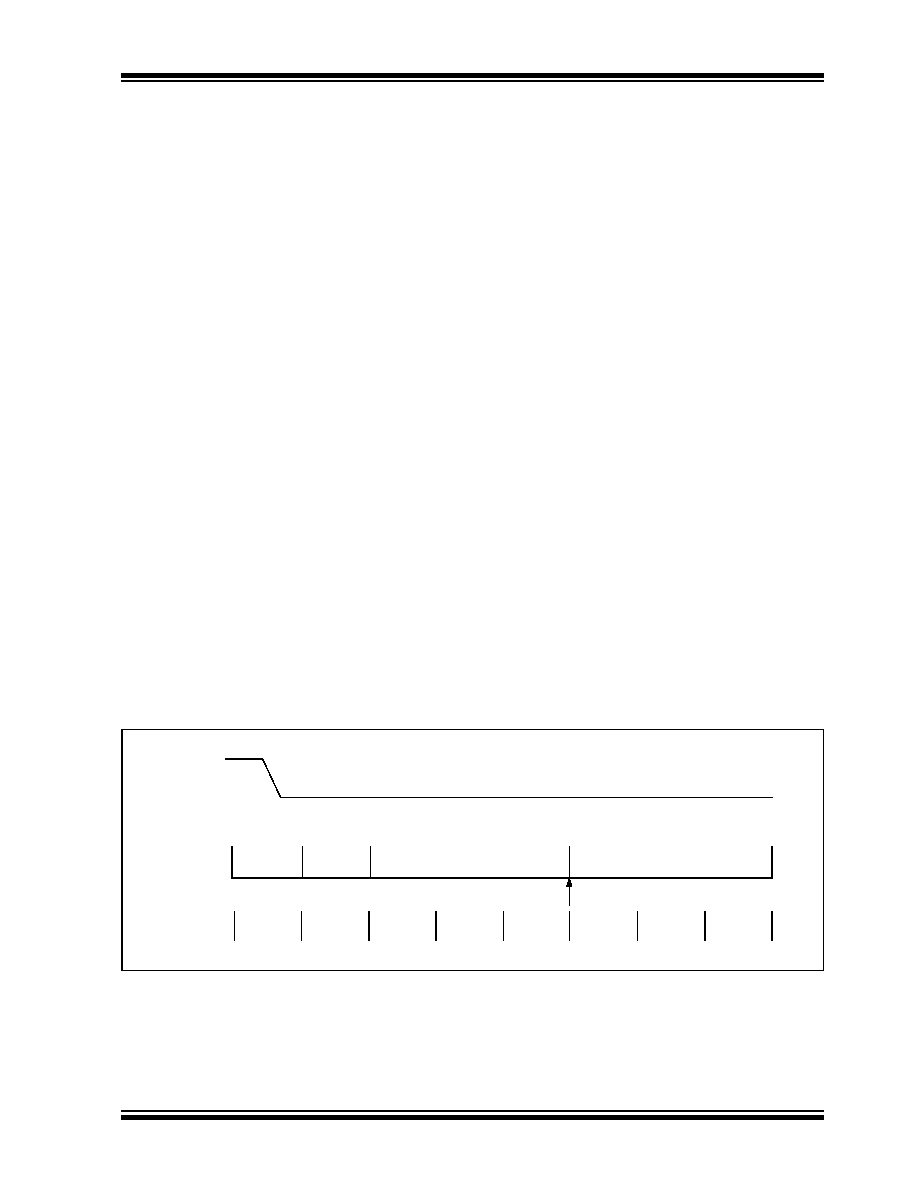
The nominal bit time can be thought of as being divided
into separate non-overlapping time segments. These
segments are shown in Figure 5-1.
- Synchronization Segment (Sync_Seg)
- Propagation Time Segment (Prop_Seg)
- Phase Buffer Segment 1 (Phase_Seg1)
- Phase Buffer Segment 2 [Phase_Seg2)
Nominal Bit Time = TQ * (Sync_Seg + Prop_Seg +
Phase_Seg1 + Phase_Seg2)
The time segments and also the nominal bit time are
made up of integer units of time called time quanta or
is programmable from a minimum of 8 TQ to a maxi-
mum of 25 TQ. Also, by definition the minimum nominal
bit time is 1 s, corresponding to a maximum 1 Mb/s
rate.
FIGURE 5-1:
BIT TIME PARTITIONING
Input Signal
Sync
Prop
Segment
Phase
Segment 1
Phase
Segment 2
Sample Point
TQ
相关PDF资料 |
PDF描述 |
|---|---|
| V48C28M75BF | CONVERTER MOD DC/DC 28V 75W |
| V48C28M75BL3 | CONVERTER MOD DC/DC 28V 75W |
| D38999/20MJ7SN | CONN RCPT 99POS WALL MNT W/SCKT |
| D38999/20JJ7SN | CONN RCPT 99POS WALL MNT W/SCKT |
| V48C24M75BL | CONVERTER MOD DC/DC 24V 75W |
相关代理商/技术参数 |
参数描述 |
|---|---|
| MCP2510-IST | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPI Interface |
| MCP2510I-ST | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPIa?¢ Interface |
| MCP2510T-/P | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPI⑩ Interface |
| MCP2510T-/SO | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPI⑩ Interface |
| MCP2510T-/ST | 制造商:MICROCHIP 制造商全称:Microchip Technology 功能描述:Stand-Alone CAN Controller with SPI⑩ Interface |
发布紧急采购,3分钟左右您将得到回复。