- 您现在的位置:买卖IC网 > PDF目录45324 > MT80C31-30R (ATMEL CORP) 8-BIT, 30 MHz, MICROCONTROLLER, PQFP44 PDF资料下载
参数资料
| 型号: | MT80C31-30R |
| 厂商: | ATMEL CORP |
| 元件分类: | 微控制器/微处理器 |
| 英文描述: | 8-BIT, 30 MHz, MICROCONTROLLER, PQFP44 |
| 封装: | 1 MM HEIGHT, QFP-44 |
| 文件页数: | 136/170页 |
| 文件大小: | 4133K |
| 代理商: | MT80C31-30R |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页第69页第70页第71页第72页第73页第74页第75页第76页第77页第78页第79页第80页第81页第82页第83页第84页第85页第86页第87页第88页第89页第90页第91页第92页第93页第94页第95页第96页第97页第98页第99页第100页第101页第102页第103页第104页第105页第106页第107页第108页第109页第110页第111页第112页第113页第114页第115页第116页第117页第118页第119页第120页第121页第122页第123页第124页第125页第126页第127页第128页第129页第130页第131页第132页第133页第134页第135页当前第136页第137页第138页第139页第140页第141页第142页第143页第144页第145页第146页第147页第148页第149页第150页第151页第152页第153页第154页第155页第156页第157页第158页第159页第160页第161页第162页第163页第164页第165页第166页第167页第168页第169页第170页
68
ATtiny4/5/9/10 [DATASHEET]
8127F–AVR–02/2013
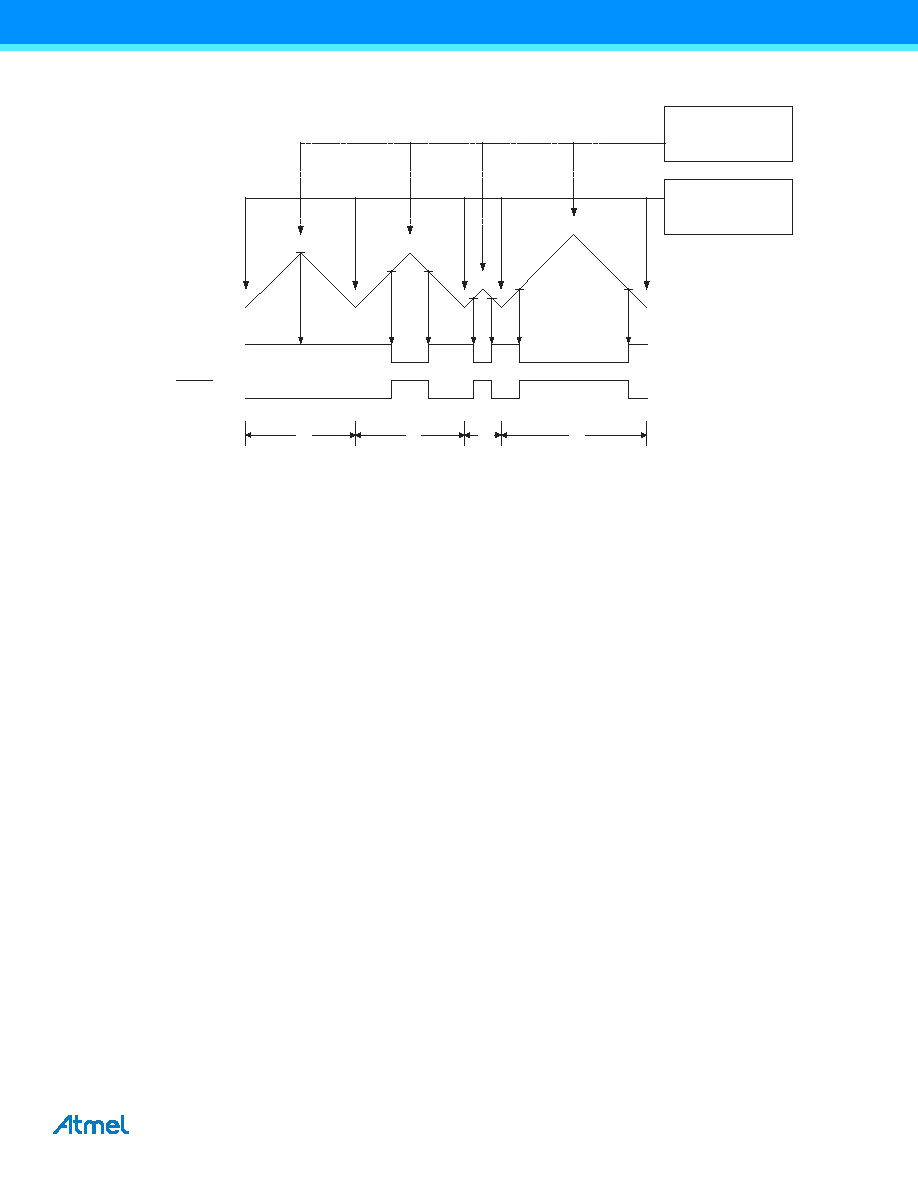
Figure 11-11. Phase and Frequency Correct PWM Mode, Timing Diagram
The Timer/Counter Overflow Flag (TOV0) is set at the same timer clock cycle as the OCR0x Registers are updated
with the double buffer value (at BOTTOM). When either OCR0A or ICR0 is used for defining the TOP value, the
OC0A or ICF0 flag set when TCNT0 has reached TOP. The interrupt flags can then be used to generate an inter-
rupt each time the counter reaches the TOP or BOTTOM value.
When changing the TOP value the program must ensure that the new TOP value is higher or equal to the value of
all of the Compare Registers. If the TOP value is lower than any of the Compare Registers, a compare match will
never occur between the TCNT0 and the OCR0x.
As Figure 11-11 on page 68 shows the output generated is, in contrast to the phase correct mode, symmetrical in
all periods. Since the OCR0x Registers are updated at BOTTOM, the length of the rising and the falling slopes will
always be equal. This gives symmetrical output pulses and is therefore frequency correct.
Using the ICR0 Register for defining TOP works well when using fixed TOP values. By using ICR0, the OCR0A
Register is free to be used for generating a PWM output on OC0A. However, if the base PWM frequency is actively
changed by changing the TOP value, using the OCR0A as TOP is clearly a better choice due to its double buffer
feature.
In phase and frequency correct PWM mode, the compare units allow generation of PWM waveforms on the OC0x
pins. Setting the COM0x1:0 bits to two will produce a non-inverted PWM and an inverted PWM output can be gen-
erated by setting the COM0x1:0 to three (See Table 11-4 on page 73). The actual OC0x value will only be visible
on the port pin if the data direction for the port pin is set as output (DDR_OC0x). The PWM waveform is generated
by setting (or clearing) the OC0x Register at the compare match between OCR0x and TCNT0 when the counter
increments, and clearing (or setting) the OC0x Register at compare match between OCR0x and TCNT0 when the
counter decrements. The PWM frequency for the output when using phase and frequency correct PWM can be cal-
culated by the following equation:
The N variable represents the prescaler divider (1, 8, 64, 256, or 1024).
OCRnx/TOP Updateand
TOVn Interrupt Flag Set
(Interrupt on Bottom)
OCnA Interrupt Flag Set
or ICFn Interrupt Flag Set
(Interrupt on TOP)
1
2
3
4
TCNTn
Period
OCnx
(COMnx1:0 = 2)
(COMnx1:0 = 3)
f
OCnxPFCPWM
f
clk_I/O
2NTOP
-----------------------------
=
相关PDF资料 |
PDF描述 |
|---|---|
| MV80C31-36D | 8-BIT, 36 MHz, MICROCONTROLLER, PQFP44 |
| MS80C51T-30R | 8-BIT, MROM, 30 MHz, MICROCONTROLLER, PQCC44 |
| MV80C31-30R | 8-BIT, 30 MHz, MICROCONTROLLER, PQFP44 |
| MS80C51C-16R | 8-BIT, MROM, 16 MHz, MICROCONTROLLER, PQCC44 |
| MF280C31-30R | 8-BIT, 30 MHz, MICROCONTROLLER, PQFP44 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| MT80C31BH | 制造商:Rochester Electronics LLC 功能描述:- Bulk 制造商:Intel 功能描述: |
| MT80C51BH | 制造商:ROCHESTER 制造商全称:ROCHESTER 功能描述:CMOS SINGLE - CHIP 8-BIT MICROCOMPUTER 64K program Memory Space |
| MT80C51FB | 制造商:Rochester Electronics LLC 功能描述:- Bulk |
| MT80C51FB/B | 制造商:Intel 功能描述: |
| MT80GB | 制造商:Datak Corporation 功能描述: |
发布紧急采购,3分钟左右您将得到回复。