- 您现在的位置:买卖IC网 > PDF目录69379 > ST7FMC1K2T6 (STMICROELECTRONICS) 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP32 PDF资料下载
参数资料
| 型号: | ST7FMC1K2T6 |
| 厂商: | STMICROELECTRONICS |
| 元件分类: | 微控制器/微处理器 |
| 英文描述: | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP32 |
| 封装: | 7 X 7 MM, LQFP-32 |
| 文件页数: | 77/311页 |
| 文件大小: | 6511K |
| 代理商: | ST7FMC1K2T6 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页第69页第70页第71页第72页第73页第74页第75页第76页当前第77页第78页第79页第80页第81页第82页第83页第84页第85页第86页第87页第88页第89页第90页第91页第92页第93页第94页第95页第96页第97页第98页第99页第100页第101页第102页第103页第104页第105页第106页第107页第108页第109页第110页第111页第112页第113页第114页第115页第116页第117页第118页第119页第120页第121页第122页第123页第124页第125页第126页第127页第128页第129页第130页第131页第132页第133页第134页第135页第136页第137页第138页第139页第140页第141页第142页第143页第144页第145页第146页第147页第148页第149页第150页第151页第152页第153页第154页第155页第156页第157页第158页第159页第160页第161页第162页第163页第164页第165页第166页第167页第168页第169页第170页第171页第172页第173页第174页第175页第176页第177页第178页第179页第180页第181页第182页第183页第184页第185页第186页第187页第188页第189页第190页第191页第192页第193页第194页第195页第196页第197页第198页第199页第200页第201页第202页第203页第204页第205页第206页第207页第208页第209页第210页第211页第212页第213页第214页第215页第216页第217页第218页第219页第220页第221页第222页第223页第224页第225页第226页第227页第228页第229页第230页第231页第232页第233页第234页第235页第236页第237页第238页第239页第240页第241页第242页第243页第244页第245页第246页第247页第248页第249页第250页第251页第252页第253页第254页第255页第256页第257页第258页第259页第260页第261页第262页第263页第264页第265页第266页第267页第268页第269页第270页第271页第272页第273页第274页第275页第276页第277页第278页第279页第280页第281页第282页第283页第284页第285页第286页第287页第288页第289页第290页第291页第292页第293页第294页第295页第296页第297页第298页第299页第300页第301页第302页第303页第304页第305页第306页第307页第308页第309页第310页第311页
ST7MC1/ST7MC2
168/308
MOTOR CONTROLLER (Cont’d)
the MCOMP and MTIM register is enabled before
a write access in the MCOMP register. This means
that if the SC bit is set and no write access is done
after in the MCOMP register, no CS commutation
event will occur.
In Speed Measurement mode, when using encod-
er or tachogenerator speed sensors (i.e. both
TES[1:0] bits in the MPAR register are not reset
and the input detection block is set-up to process
sensor signals), motor speed can be measured
but it is not possible drive a motor in six-step
mode, either sensored or sensorless.
Speed Measurement mode is useful for motors
supplied with 3-phase sinewave-modulated PWM
signals:
– AC induction motors,
– Permanent Magnet AC (PMAC) motors (al-
though it needs three position sensors, they
can be handled just like tachogenerator sig-
nals).
This mode uses only part of the Delay Manager’s
resources. For more details refer to “Speed Meas-
Table 37. Switched and Autoswitched modes
10.6.7.1 Switched Mode
This feature allows the motor to be run step-by-
step. This is useful when the rotor speed is still too
low to generate a BEMF. It can also run other
kinds of motor without BEMF generation such as
induction motors or switch reluctance motors. This
mode can also be used for autoswitching with all
computation for the next commutation time done
by software (hardware multiplier not used) and us-
ing the powerful interrupt set of the peripheral.
In this mode, the step time is directly written by
software in the commutation compare register
MCOMP. When the MTIM timer reaches this value
a commutation occurs (C event) and the MTIM
timer is reset.
At this time all registers with a preload function are
loaded (registers marked with (*) in Section
10.6.13). The CI bit of MISR is set and if the CIM
bit in the MIMR register is set an interrupt is gener-
ated.
The MTIM timer prescaler (Step ratio bits ST[3:0]
in the MPRSR register) is user programmable. Ac-
cess to this register is not allowed while the MTIM
timer is running (access is possible only before the
starting the timer by means of the CKE bit) but the
prescaler contents can be incremented/decre-
mented at the next commutation event by setting
the RMI (decrement) or RPI (increment) bits in the
MISR register. When this method is used, at the
next commutation event the prescaler value will be
updated but also all the MTIM timer-related regis-
ters will be shifted in the appropriate direction to
keep their value. After it has been taken into ac-
count, (at commutation) the RPI or RMI bit is reset
by hardware. See Table 38.
Only one update per step is allowed, so if both RPI
and RMI bits are set together by software, this
does not affect the MISR register: the write access
to these two bits together is not taken into account
and the previous state is kept. This means that if
either RPI or RMI bit was set before the write ac-
cess of both bits at the same time, this bit (RPI or
RMI) is kept at 1. If none of them was set before
the simultaneous write access, none of them will
be set after the write access.
In switched mode, BEMF and demagnetization de-
tection are already possible in order to pass in au-
toswitched mode as soon as possible but Z and D
events do not affect the timer contents.
In this mode, if an MTIM overflow occurs, it re-
starts counting from 0x00h and the OI overflow
flag in the MCRC register is set if the TES[1:0] bits
= 00.
Caution: In this mode, MCOMP must never be
written to 0.
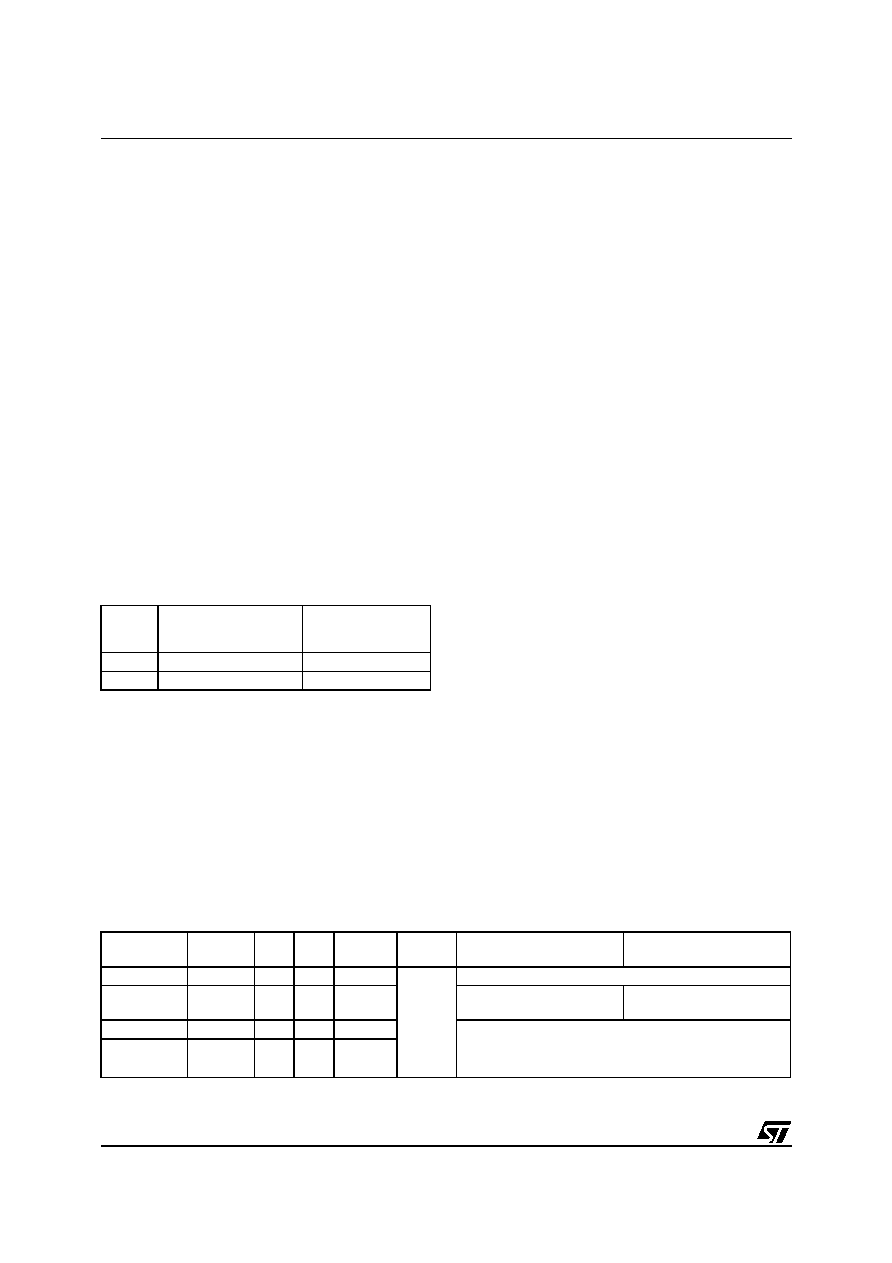
Table 38. Step Update
SWA
bit
Commutation Type
MCOMP User
access
0
Switched mode
Read/Write
1
Autoswitched mode
Read/Write
Mode
TES[1:0]
CKE
bit
SWA
bit
Clock
State
Read
Ratio Increment
(Slow Down)
Ratio Decrement
(Speed-Up)
x
xx
0
x
Disabled
Always
possible
Write the ST[3:0] value directly in the MPRSR register
Switched
00
1
0
Enabled
Set RPI bit in the MISR reg-
ister till next commutation
Set RMI bit in the MISR reg-
ister till next commutation
Autoswitched
00
1
Enabled
Automatically updated according to MZREG value
Speed
measure
01 10 11
1
x
Enabled
1
相关PDF资料 |
PDF描述 |
|---|---|
| ST7MC2S4T6/XXX | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP44 |
| ST7FMC2N6B6 | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PDIP56 |
| ST7FMC2S6T6 | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP44 |
| ST7PMC2M9T6/XXX | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP80 |
| ST7PMC2R6T6/XXX | 8-BIT, FLASH, 8 MHz, MICROCONTROLLER, PQFP64 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| ST7FMC1K2T6/TR | 功能描述:8位微控制器 -MCU 8B MCU WITH NESTED INTERRUPTS RoHS:否 制造商:Silicon Labs 核心:8051 处理器系列:C8051F39x 数据总线宽度:8 bit 最大时钟频率:50 MHz 程序存储器大小:16 KB 数据 RAM 大小:1 KB 片上 ADC:Yes 工作电源电压:1.8 V to 3.6 V 工作温度范围:- 40 C to + 105 C 封装 / 箱体:QFN-20 安装风格:SMD/SMT |
| ST7FMC1K2TC | 制造商:STMicroelectronics 功能描述: |
| ST7FMC1K2TCE | 功能描述:插座和适配器 MCU TQFP32 7x7 RoHS:否 制造商:Silicon Labs 产品:Adapter 用于:EM35x |
| ST7FMC1K4B3 | 制造商:STMICROELECTRONICS 制造商全称:STMicroelectronics 功能描述:8-bit MCU with nested interrupts, Flash, 10-bit ADC, brushless motor control, five timers, SPI, LINSCI? |
| ST7FMC1K4B6 | 制造商:STMICROELECTRONICS 制造商全称:STMicroelectronics 功能描述:8-bit MCU with nested interrupts, Flash, 10-bit ADC, brushless motor control, five timers, SPI, LINSCI? |
发布紧急采购,3分钟左右您将得到回复。