- 您现在的位置:买卖IC网 > PDF目录98145 > ST72651AR6T1E/XXX (STMICROELECTRONICS) 8-BIT, MROM, MICROCONTROLLER, PQFP64 PDF资料下载
参数资料
| 型号: | ST72651AR6T1E/XXX |
| 厂商: | STMICROELECTRONICS |
| 元件分类: | 微控制器/微处理器 |
| 英文描述: | 8-BIT, MROM, MICROCONTROLLER, PQFP64 |
| 封装: | 10 X 10 MM, ROHS COMPLIANT, TQFP-64 |
| 文件页数: | 156/161页 |
| 文件大小: | 2656K |
| 代理商: | ST72651AR6T1E/XXX |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页第69页第70页第71页第72页第73页第74页第75页第76页第77页第78页第79页第80页第81页第82页第83页第84页第85页第86页第87页第88页第89页第90页第91页第92页第93页第94页第95页第96页第97页第98页第99页第100页第101页第102页第103页第104页第105页第106页第107页第108页第109页第110页第111页第112页第113页第114页第115页第116页第117页第118页第119页第120页第121页第122页第123页第124页第125页第126页第127页第128页第129页第130页第131页第132页第133页第134页第135页第136页第137页第138页第139页第140页第141页第142页第143页第144页第145页第146页第147页第148页第149页第150页第151页第152页第153页第154页第155页当前第156页第157页第158页第159页第160页第161页
ST72651AR6
94/161
Doc ID 7215 Rev 4
11.6 SERIAL PERIPHERAL INTERFACE (SPI)
11.6.1 Introduction
The Serial Peripheral Interface (SPI) allows full-
duplex, synchronous, serial communication with
external devices. An SPI system may consist of a
master and one or more slaves however the SPI
interface can not be a master in a multimaster sys-
tem.
11.6.2 Main Features
■ Full duplex synchronous transfers (on 3 lines)
■ Simplex synchronous transfers (on 2 lines)
■ Master or slave operation
■ Six master mode frequencies (fCPU/2 max.)
■ fCPU/2 max. slave mode frequency (see note)
■ SS Management by software or hardware
■ Programmable clock polarity and phase
■ End of transfer interrupt flag
■ Write collision, Master Mode Fault and Overrun
flags
Note: In slave mode, continuous transmission is
not possible at maximum frequency due to the
software overhead for clearing status flags and to
initiate the next transmission sequence.
11.6.3 General Description
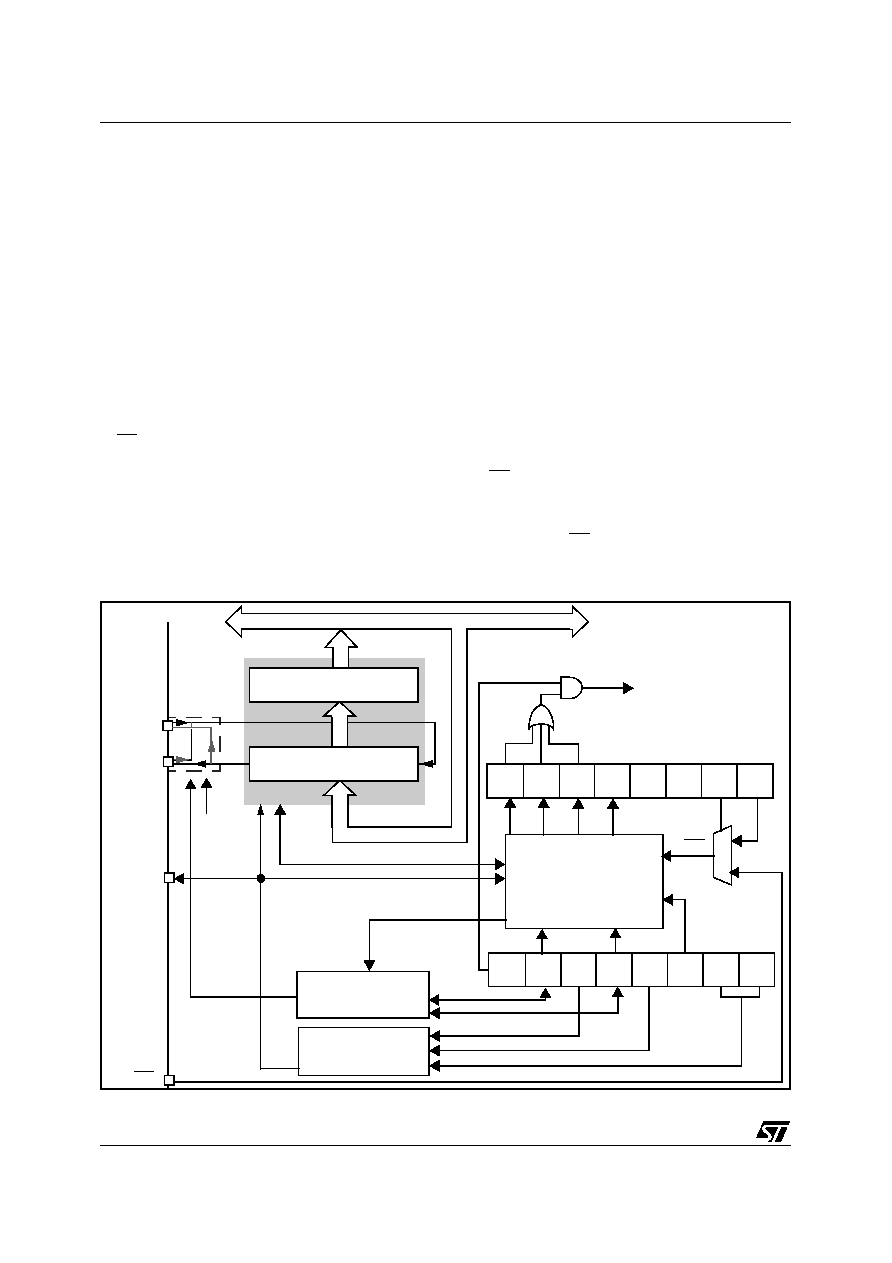
Figure 55 shows the serial peripheral interface
(SPI) block diagram. There are 3 registers:
– SPI Control Register (SPICR)
– SPI Control/Status Register (SPICSR)
– SPI Data Register (SPIDR)
The SPI is connected to external devices through
3 pins:
– MISO: Master In / Slave Out data
– MOSI: Master Out / Slave In data
– SCK: Serial Clock out by SPI masters and in-
put by SPI slaves
–SS: Slave select:
This input signal acts as a ‘chip select’ to let
the SPI master communicate with slaves indi-
vidually and to avoid contention on the data
lines. Slave SS inputs can be driven by stand-
ard I/O ports on the master MCU.
Figure 55. Serial Peripheral Interface Block Diagram
SPIDR
Read Buffer
8-Bit Shift Register
Write
Read
Data/Address Bus
SPI
SPIE
SPE
MSTR
CPHA
SPR0
SPR1
CPOL
SERIAL CLOCK
GENERATOR
MOSI
MISO
SS
SCK
CONTROL
STATE
SPICR
SPICSR
Interrupt
request
MASTER
CONTROL
SPR2
0
7
0
7
SPIF WCOL
MODF
0
OVR
SSI
SSM
SOD
bit
SS
1
0
相关PDF资料 |
PDF描述 |
|---|---|
| ST72652C4T1/XXX | 8-BIT, MROM, MICROCONTROLLER, PQFP48 |
| ST7267R8T1L/XXX | 16-BIT, MROM, 30 MHz, RISC MICROCONTROLLER, PQFP64 |
| ST7267C8T1/XXX | 16-BIT, MROM, 30 MHz, RISC MICROCONTROLLER, PQFP48 |
| ST72774S9T1/XXX | 8-BIT, MROM, 8 MHz, MICROCONTROLLER, PQFP44 |
| ST72E734J6D0 | 8-BIT, UVPROM, 8 MHz, MICROCONTROLLER, CDIP42 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| ST7265X-EVAL/MS | 制造商:STMicroelectronics 功能描述:ST6 EVAL BD - Bulk |
| ST7265X-EVAL/PFD | 制造商:STMicroelectronics 功能描述:USB FLASH EVAL - Bulk |
| ST7266 | 制造商:6940 功能描述:ST7266 |
| ST7267C8T1L | 制造商:STMicroelectronics 功能描述: |
| ST72681/R12 | 制造商:STMicroelectronics 功能描述:CONTROLLER FOR HIGH-PERFORMANCE BUS-POWERED USB 2.0 FLASH DR - Trays |
发布紧急采购,3分钟左右您将得到回复。