- 您现在的位置:买卖IC网 > PDF目录1773 > A4979GLPTR-T (Allegro Microsystems Inc)IC MOTOR DRVR MICRO STEP 28TSSOP PDF资料下载
参数资料
| 型号: | A4979GLPTR-T |
| 厂商: | Allegro Microsystems Inc |
| 文件页数: | 22/44页 |
| 文件大小: | 0K |
| 描述: | IC MOTOR DRVR MICRO STEP 28TSSOP |
| 特色产品: | A4979 Series |
| 标准包装: | 1 |
| 应用: | 直流电机驱动器,PWM 电机驱动器,步进电机驱动器 |
| 评估套件: | 可供 |
| 输出数: | 1 |
| 电流 - 输出: | 1.5A |
| 电压 - 负载: | 7 V ~ 50 V |
| 电源电压: | 3 V ~ 5.5 V |
| 工作温度: | -40°C ~ 105°C |
| 安装类型: | 表面贴装 |
| 封装/外壳: | 28-SOIC(0.173",4.40mm 宽)裸露焊盘 |
| 供应商设备封装: | 28-TSSOP 裸露焊盘 |
| 包装: | 标准包装 |
| 其它名称: | 620-1463-6 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页当前第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页
�� �
�
�A4979�
�Microstepping� Programmable� Stepper� Motor� Driver�
�With� Stall� Detect� and� Short� Circuit� Protection�
�Application� Information�
�Motor� Movement� Control�
�The� A4979� provides� two� independent� methods� to� control� the�
�movement� of� a� stepper� motor.� The� simpler� is� the� Step� and� Direc-�
�tion� method,� which� only� requires� two� control� signals� to� control�
�the� stepper� motor� in� either� direction.� The� other� method� is� through�
�the� serial� interface,� which� provides� more� flexible� control� capa-�
�bility.� Both� methods� can� be� used� together� (although� it� is� not�
�common),� provided� the� timing� restrictions� of� the� STEP� input� in�
�relation� to� the� STRn� input� are� preserved.�
�Phase� Table� and� Phase� Diagram�
�The� key� to� understanding� both� of� the� available� control� methods�
�lies� in� understanding� the� Phase� Current� table� (table� 7).� This� table�
�contains� the� relative� phase� current� magnitude� and� direction� for�
�each� of� the� two� motor� phases� at� each� microstep� position.� The�
�maximum� resolution� of� the� A4979� is� one-sixteenth� microstep.�
�That� is� 16� microsteps� per� full� step.� There� are� 4� full� steps� per� elec-�
�trical� cycle,� so� the� phase� current� table� has� 64� microstep� entries.�
�The� entries� are� numbered� from� 0� to� 63.� This� number� represents�
�I� A�
�the� phase� angle� within� the� full� 360°� electrical� cycle� and� is� called�
�the� Step� Angle� Number.� This� is� illustrated� in� figure� 3.�
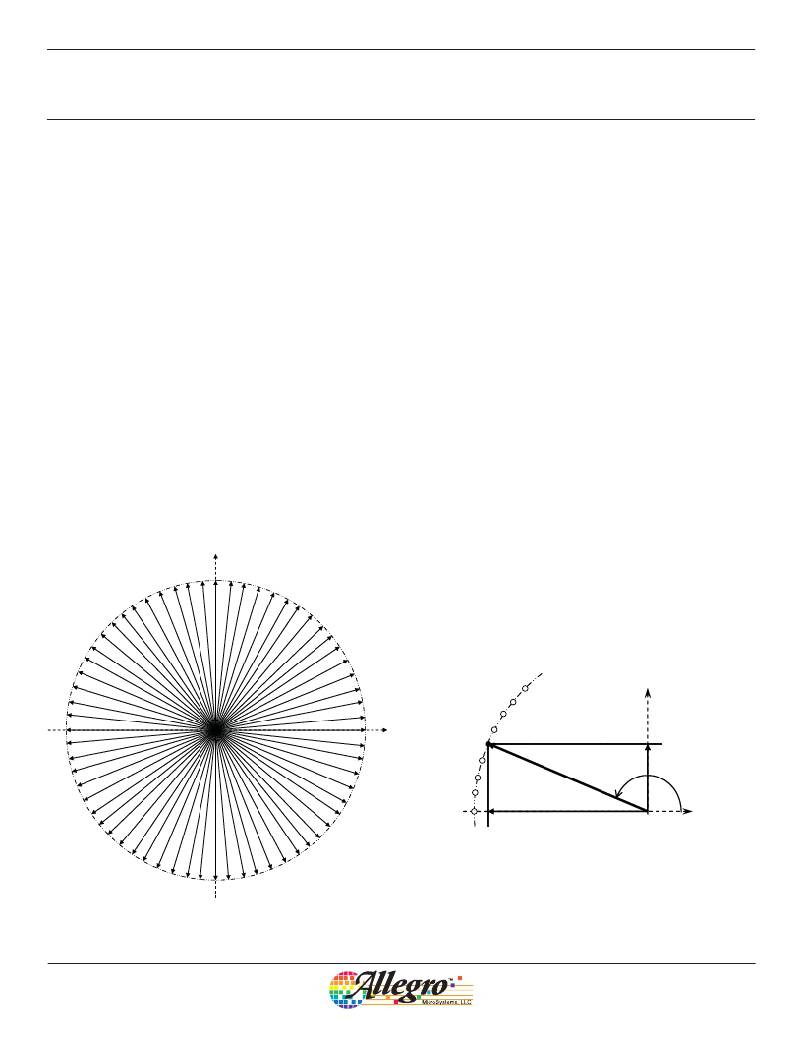
�Figure� 5� shows� the� contents� of� the� phase� current� table� as� a� phase�
�diagram.� The� phase� B� current,� I� B� ,� from� the� phase� current� table,� is�
�plotted� on� horizontal� axis� and� the� phase� A� current,� I� A� ,� is� plotted�
�on� the� vertical� axis.� The� resultant� motor� current� at� each� microstep�
�is� shown� as� numbered� radial� arrows.� The� number� shown� corre-�
�sponds� to� the� one-sixteenth� microstep� Step� Angle� Number� in� the�
�phase� current� table.�
�Figure� 4� shows� an� example� of� calculating� the� resultant� motor�
�current� magnitude� and� angle� for� step� number� 28.� The� target� is� to�
�have� the� magnitude� of� the� resultant� motor� current� be� 100%� at� all�
�microstep� positions.� The� relative� phase� currents� from� the� phase�
�current� table� are:�
�I� A� =� 37.50%�
�I� B� =� –92.19%�
�Assuming� a� full� scale� (100%)� current� of� 1A� means� that� the� two�
�phase� currents� are:�
�I� A� =� 0.3750� A�
�25�
�24�
�23�
�22�
�21�
�20�
�19�
�18� 17� 16� 15� 14�
�13�
�12�
�11�
�10�
�9�
�8�
�7�
�I� B� =� -0.9219� A�
�26�
�27�
�6�
�5�
�28�
�29�
�30�
�31�
�4�
�3�
�2�
�1�
�25�
�26�
�24�
�I� A�
�32�
�33�
�0�
�63�
�I� B�
�27�
�28�
�I� A28�
�34�
�35�
�36�
�37�
�62�
�61�
�60�
�59�
�29�
�30�
�31�
�α� 28� =�
�157.9°�
�=37.5%�
�I� B�
�38�
�39�
�40�
�41�
�42�
�43�
�44�
�45�
�46� 47� 48� 49� 50�
�51�
�52�
�53�
�54�
�55�
�56�
�57�
�58�
�32�
�I� B28� =� –� 92.19%�
�Figure� 3.� A4979� Phase� Current� table� as� a� phase� diagram;� values� shown�
�are� referred� to� as� the� Step� Angle� Number�
�Figure� 4.� Calculation� of� resultant� motor� current�
�Allegro� MicroSystems,� LLC�
�115� Northeast� Cutoff�
�Worcester,� Massachusetts� 01615-0036� U.S.A.�
�1.508.853.5000;� www.allegromicro.com�
�22�
�相关PDF资料 |
PDF描述 |
|---|---|
| A4980KLPTR-T | IC STEPPER DVR PROGR 28-TSSOP |
| A4982SLPTR-T | IC DRIVER MICROSTEPPING 24-TSSOP |
| A4983SETTR-T | IC MOTOR DRIVER MICROSTEP 28-QFN |
| A4984SLPTR-T | IC STEPPER MOTOR DRIVER 24TSSOP |
| A4985SETTR-T | IC STEPPER MOTOR DRIVER 32QFN |
相关代理商/技术参数 |
参数描述 |
|---|---|
| A4980 | 制造商:ALLEGRO 制造商全称:Allegro MicroSystems 功能描述:The A4980 is a flexible microstepping motor driver with built-in translator for easy operation. |
| A4980KLP-T | 制造商:Allegro MicroSystems LLC 功能描述: |
| A4980KLPTR-T | 功能描述:IC STEPPER DVR PROGR 28-TSSOP RoHS:是 类别:集成电路 (IC) >> PMIC - 电机和风扇控制器,驱动器 系列:- 标准包装:1 系列:- 应用:步进电机驱动器,1-2 相,2 相 评估套件:- 输出数:1 电流 - 输出:800mA 电压 - 负载:10 V ~ 28 V 电源电压:4.75 V ~ 5.25 V 工作温度:-20°C ~ 90°C 安装类型:表面贴装 封装/外壳:28-SOP + 2 翼片裸露焊盘 供应商设备封装:28-HSOPHC(15.2x7.9) 包装:剪切带 (CT) 其它名称:869-1268-1 |
| A4982 | 制造商:ALLEGRO 制造商全称:Allegro MicroSystems 功能描述:DMOS Microstepping Driver with Translator And Overcurrent Protection |
| A4982_V4 | 制造商:ALLEGRO 制造商全称:Allegro MicroSystems 功能描述:DMOS Microstepping Driver with Translator And Overcurrent Protection |
发布紧急采购,3分钟左右您将得到回复。