- 您现在的位置:买卖IC网 > PDF目录98141 > SPAKXC16Z1VFV20 (MOTOROLA INC) 16-BIT, 20 MHz, MICROCONTROLLER, PQFP144 PDF资料下载
参数资料
| 型号: | SPAKXC16Z1VFV20 |
| 厂商: | MOTOROLA INC |
| 元件分类: | 微控制器/微处理器 |
| 英文描述: | 16-BIT, 20 MHz, MICROCONTROLLER, PQFP144 |
| 封装: | PLASTIC, SMT-144 |
| 文件页数: | 136/200页 |
| 文件大小: | 1383K |
| 代理商: | SPAKXC16Z1VFV20 |
第1页第2页第3页第4页第5页第6页第7页第8页第9页第10页第11页第12页第13页第14页第15页第16页第17页第18页第19页第20页第21页第22页第23页第24页第25页第26页第27页第28页第29页第30页第31页第32页第33页第34页第35页第36页第37页第38页第39页第40页第41页第42页第43页第44页第45页第46页第47页第48页第49页第50页第51页第52页第53页第54页第55页第56页第57页第58页第59页第60页第61页第62页第63页第64页第65页第66页第67页第68页第69页第70页第71页第72页第73页第74页第75页第76页第77页第78页第79页第80页第81页第82页第83页第84页第85页第86页第87页第88页第89页第90页第91页第92页第93页第94页第95页第96页第97页第98页第99页第100页第101页第102页第103页第104页第105页第106页第107页第108页第109页第110页第111页第112页第113页第114页第115页第116页第117页第118页第119页第120页第121页第122页第123页第124页第125页第126页第127页第128页第129页第130页第131页第132页第133页第134页第135页当前第136页第137页第138页第139页第140页第141页第142页第143页第144页第145页第146页第147页第148页第149页第150页第151页第152页第153页第154页第155页第156页第157页第158页第159页第160页第161页第162页第163页第164页第165页第166页第167页第168页第169页第170页第171页第172页第173页第174页第175页第176页第177页第178页第179页第180页第181页第182页第183页第184页第185页第186页第187页第188页第189页第190页第191页第192页第193页第194页第195页第196页第197页第198页第199页第200页
MOTOROLA
MC68HC16Z1
40
MC68HC16Z1TS/D
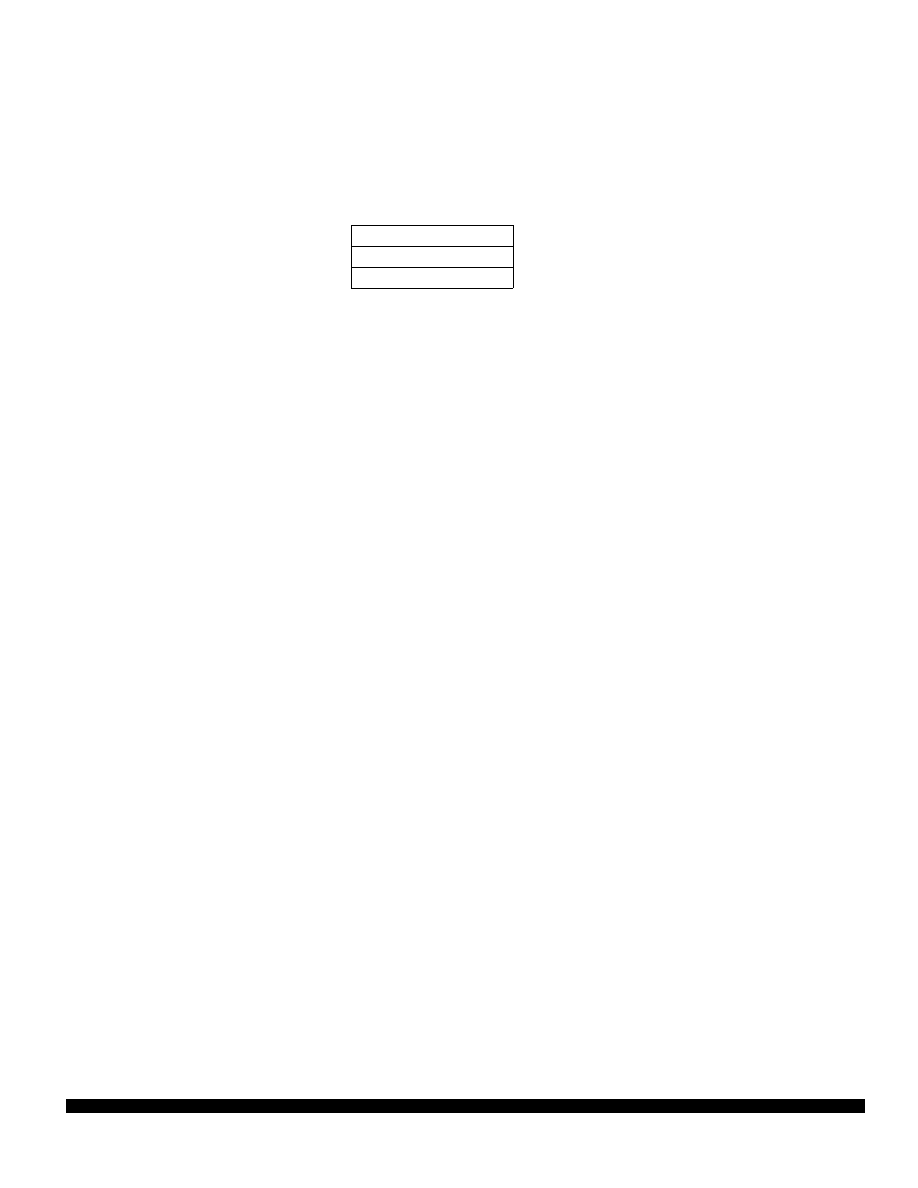
2.7.2 Exception Stack Frame
During exception processing, the contents of the program counter and condition code register are
stacked at a location pointed to by SK : SP. Unless it is altered during exception processing, the stacked
PK : PC value is the address of the next instruction in the current instruction stream, plus $0006. The
following figure shows the exception stack frame.
Figure 7 Exception Stack Frame
2.7.3 Exception Processing Sequence
Exception processing is performed in four distinct phases.
Priority of all pending exceptions is evaluated, and the highest priority exception is processed first.
Processor state is stacked, then the CCR PK extension field is cleared.
An exception vector number is acquired and converted to a vector address.
The content of the vector address is loaded into the PC, and the processor jumps to the exception
handler routine.
There are variations within each phase for differing types of exceptions. However, all vectors but reset
contain 16-bit addresses, and the PK field is cleared. Exception handlers must be located within bank
0, or vectors must point to a jump table.
2.7.4 Types of Exceptions
Exceptions can be generated either internally or externally. External exceptions which are defined as
asynchronous, include interrupts, bus errors (BERR), breakpoints (BKPT), and resets (RESET). Inter-
nal exceptions, which are defined as synchronous, include the software interrupt (SWI) instruction, the
background (BGND) instruction, illegal instruction exceptions, and the divide-by-zero exception. Refer
to 3 System Integration Module for more information about resets and interrupts.
Asynchronous exceptions occur without reference to CPU16 or IMB clocks, but exception processing
is synchronized. For all asynchronous exceptions but RESET, exception processing begins at the first
instruction boundary following recognition of an exception.
Synchronous exception processing is part of an instruction definition. Exception processing for synchro-
nous exceptions will always be completed, and the first instruction of the handler routine will always be
executed, before interrupts are detected.
Because of pipelining, the stacked return PK : PC value for asynchronous exceptions, other than RE-
SET, is equal to the address of the next instruction in the current instruction stream plus $0006. The
RTI instruction, which must terminate all exception handler routines, subtracts $0006 from the stacked
value in order to resume execution of the interrupted instruction stream. The value of PK : PC at the
time a synchronous exception executes is equal to the address of the instruction that causes the excep-
tion plus $0006. Since RTI always subtracts $0006 upon return, the stacked PK : PC must be adjusted
by the instruction that caused the exception so that execution will resume with the following instruction.
$0002 is added to the PK : PC value before it is stacked.
Low Address
SP After Exception Stacking
Condition Code Register
High Address
Program Counter
SP Before Exception Stacking
相关PDF资料 |
PDF描述 |
|---|---|
| SPAKXCF333CFT20 | 32-BIT, FLASH, 20 MHz, MICROCONTROLLER, PQFP16 |
| SPAKXCF333MFT20 | 32-BIT, FLASH, 20 MHz, MICROCONTROLLER, PQFP16 |
| SPAKXCF333VFT20 | 32-BIT, FLASH, 20 MHz, MICROCONTROLLER, PQFP16 |
| SPC3010F | 24 Mbps, FIXED DISK CONTROLLER, PQFP100 |
| SPC560B50L5C5E0R | 32-BIT, FLASH, 64 MHz, MICROCONTROLLER, PQFP144 |
相关代理商/技术参数 |
参数描述 |
|---|---|
| SPAKXC301GC100D | 制造商:Motorola Inc 功能描述: |
| SPAKXC301PW100D | 制造商:Motorola Inc 功能描述: |
| SPAKXC309AG100A | 功能描述:数字信号处理器和控制器 - DSP, DSC 24 BIT DSP PBFREE RoHS:否 制造商:Microchip Technology 核心:dsPIC 数据总线宽度:16 bit 程序存储器大小:16 KB 数据 RAM 大小:2 KB 最大时钟频率:40 MHz 可编程输入/输出端数量:35 定时器数量:3 设备每秒兆指令数:50 MIPs 工作电源电压:3.3 V 最大工作温度:+ 85 C 封装 / 箱体:TQFP-44 安装风格:SMD/SMT |
| SPAKXC309GC100A | 制造商:Motorola 功能描述:MOTOROLA |
| SPAKXC309VF100A | 功能描述:IC DSP 24BIT 100MHZ 196-MAPBGA RoHS:否 类别:集成电路 (IC) >> 嵌入式 - DSP(数字式信号处理器) 系列:DSP563xx 标准包装:40 系列:TMS320DM64x, DaVinci™ 类型:定点 接口:I²C,McASP,McBSP 时钟速率:400MHz 非易失内存:外部 芯片上RAM:160kB 电压 - 输入/输出:3.30V 电压 - 核心:1.20V 工作温度:0°C ~ 90°C 安装类型:表面贴装 封装/外壳:548-BBGA,FCBGA 供应商设备封装:548-FCBGA(27x27) 包装:托盘 配用:TMDSDMK642-0E-ND - DEVELPER KIT W/NTSC CAMERA296-23038-ND - DSP STARTER KIT FOR TMS320C6416296-23059-ND - FLASHBURN PORTING KIT296-23058-ND - EVAL MODULE FOR DM642TMDSDMK642-ND - DEVELOPER KIT W/NTSC CAMERA |
发布紧急采购,3分钟左右您将得到回复。